Overview of Ultrasonic Sensor
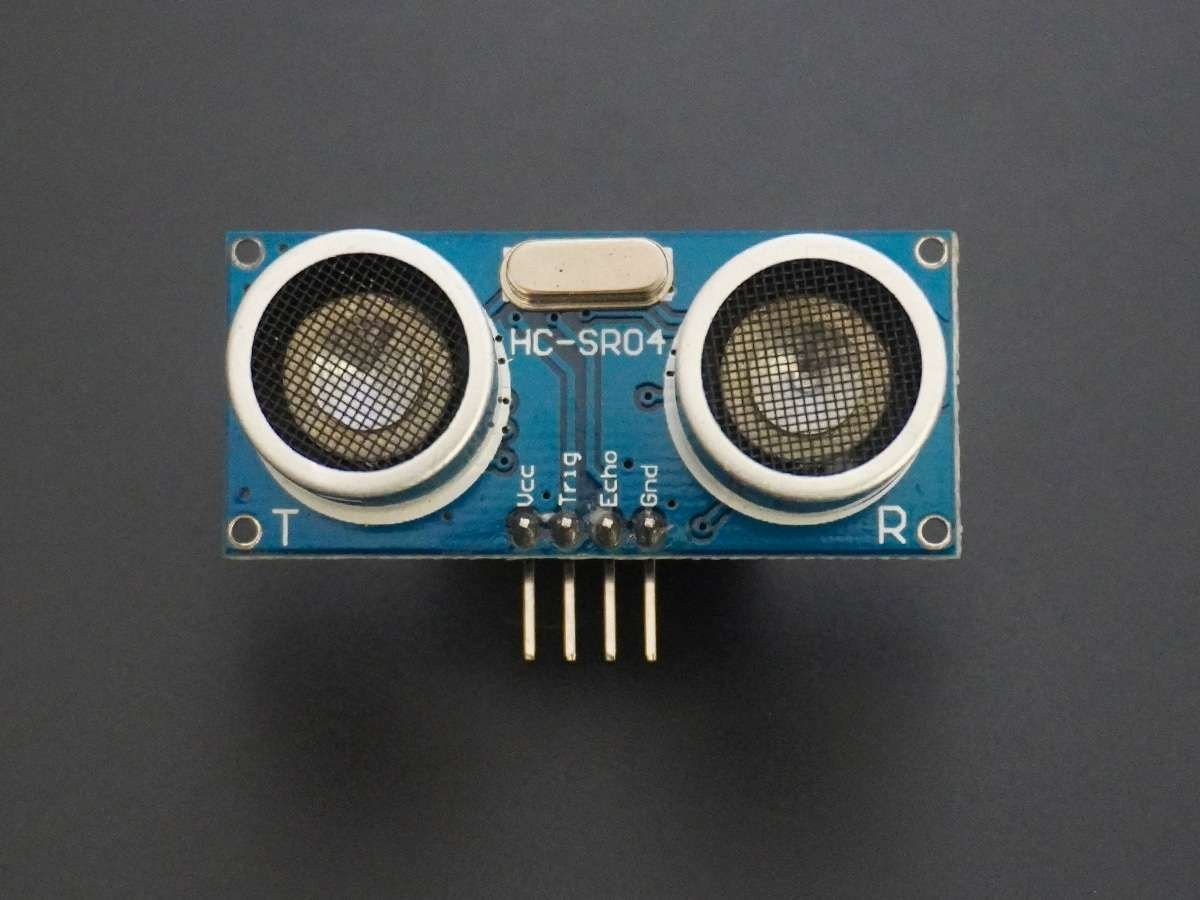

- Ultrasonic Module HC-SR04 works on the principle of SONAR and RADAR system. It can be used to determine the distance of an object in the range of 2 cm – 400 cm.
- The module has only 4 pins,
- VCC
- GND
- Trig
- Echo
- When a pulse of 10µsec or more is given to the Trig pin, 8 pulses of 40 kHz are generated. After this, the Echo pin is made high by the control circuit in the module. Echo pin remains high till it gets echo signal of the transmitted pulses back.
- The time for which the echo pin remains high, i.e. the width of the Echo pin gives the time taken for generated ultrasonic sound to travel to the object and back.
- Using this time and the speed of sound in air, we can find the distance of the object using a simple formula for distance using speed and time.
For more information about ultrasonic module HC-SR04 and how to use it, refer the topic Ultrasonic Module HC-SR04 in the sensors and modules section.
Application
Let’s design an application in which we will find a distance to an object by interfacing ultrasonic module HC-SR04 with Arduino and display the distance on the Serial monitor.
In this application, we are using Ping example that comes with Arduino in the Sensors library.
You can find this example in –
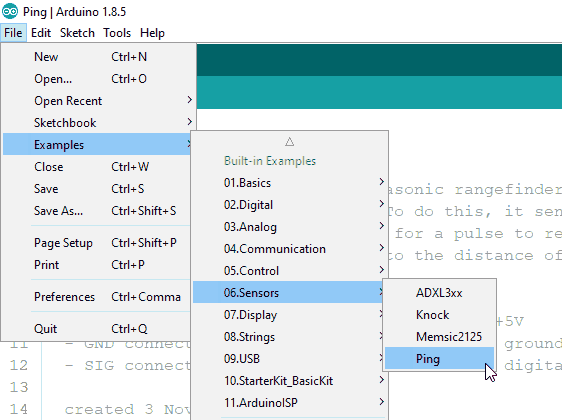
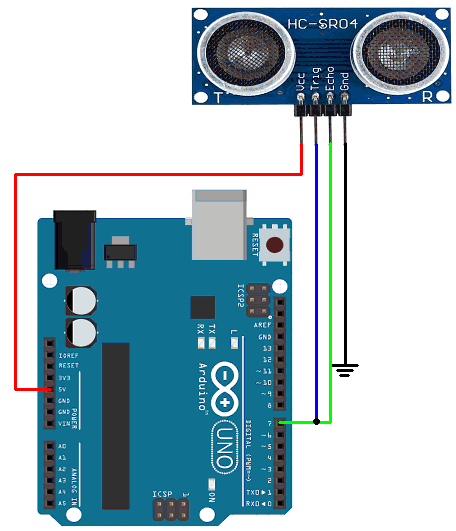
Connection Diagram of Ultrasonic Sensor HC-SR04 with Arduino
Distance Measurement Code using Ultrasonic Sensor HC-SR04 and Arduino Uno
/*
Ping))) Sensor
This sketch reads a PING))) ultrasonic rangefinder and returns the distance
to the closest object in range. To do this, it sends a pulse to the sensor to
initiate a reading, then listens for a pulse to return. The length of the
returning pulse is proportional to the distance of the object from the sensor.
The circuit:
- +V connection of the PING))) attached to +5V
- GND connection of the PING))) attached to ground
- SIG connection of the PING))) attached to digital pin 7
created 3 Nov 2008
by David A. Mellis
modified 30 Aug 2011
by Tom Igoe
This example code is in the public domain.
http://www.arduino.cc/en/Tutorial/Ping
*/
// this constant won't change. It's the pin number of the sensor's output:
const int pingPin = 7;
void setup() {
// initialize serial communication:
Serial.begin(9600);
}
void loop() {
// establish variables for duration of the ping, and the distance result
// in inches and centimeters:
long duration, inches, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH pulse
// whose duration is the time (in microseconds) from the sending of the ping
// to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds) {
// According to Parallax's datasheet for the PING))), there are 73.746
// microseconds per inch (i.e. sound travels at 1130 feet per second).
// This gives the distance travelled by the ping, outbound and return,
// so we divide by 2 to get the distance of the obstacle.
// See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the object we
// take half of the distance travelled.
return microseconds / 29 / 2;
}
Function Used
pulseIn()Reads a pulse (either HIGH or LOW) on a pin.
For example, if value is HIGH, pulseIn() waits for the pin to go from LOW to HIGH, starts timing, then waits for the pin to go LOW and stops timing. Returns the length of the pulse in microseconds or returns 0 if no complete pulse was received within the timeout.
E.g.
pulseIn(7, HIGH);
Video of Distance Measurement using Ultrasonic Sensor HC-SR04 and Arduino Uno
Components Used |
||
|---|---|---|
| Arduino UNO Arduino UNO |
X 1 | |
| Arduino Nano Arduino Nano |
X 1 | |
| Ultrasonic Module HC-SR04 Ultrasonic module HC-SR04 is generally used for finding distance value and obstacle detection. It can operate in the range 2cm-400cm. |
X 1 | |
| Breadboard Breadboard |
X 1 | |