HealthBuddy – Intelligent Desktop Health Monitor
1. Project Overview & System Block Diagram
Before starting, understand the data flow:
Finger → MAX30102 Sensor → ESP32 (I2C) → OLED Display (I2C)
↓ ↓
No Finger Buzzer (GPIO)
↓
Robot face
Decision Logic:
- BPM < 60 or BPM > 100 → Unhealthy → Buzzer ON + Sad face 😞
- 60 ≤ BPM ≤ 100 → Healthy → Buzzer OFF + Happy face 😊
- No Finger = Robot Face (Desktop Companion)
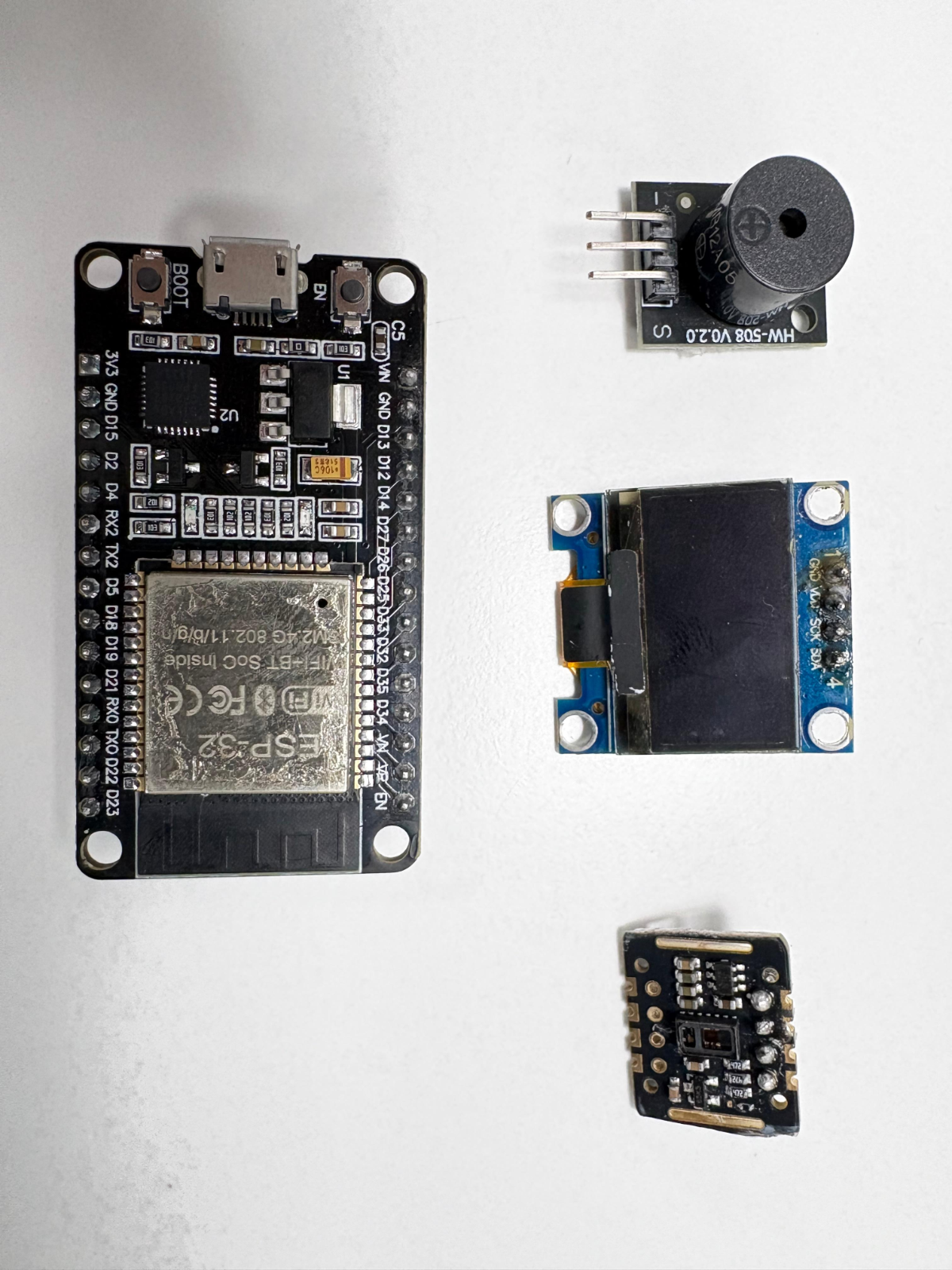
2. Component List with Estimated Cost (India)
Component Quantity Approx. Cost (₹) ESP32 Dev Board 1 400 MAX30102 (Heart rate sensor) 1 350 OLED Display (0.96", I2C, 128x64) 1 250 USB B Type Cable 1 200 Breadboard + Jumper wires 1 set 100 Buzzer 1 100 Total 1400 You can reduce cost by using ESP8266 (but ESP32 is recommended for stability).
3. Circuit Connections (Step by Step)
MAX30102 ↔ ESP32 (I2C)
| MAX30102 | ESP32 |
| VIN | 3.3V |
| GND | GND |
| SCL | GPIO22 |
| SDA | GPIO21 |
OLED Display ↔ ESP32 (I2C – same bus)
| OLED | ESP32 |
| VCC | VCC |
| GND | GND |
| SCL | GPIO22 |
| SDA | GPIO21 |
Buzzer ↔ ESP32
| Buzzer (+) | ESP32 GPIO 25 |
| Buzzer (-) | GND |
Important: Use same I2C pins (SCL=22, SDA=21) for both sensor and display.
4. Software Setup (Arduino IDE)
Step 4.1 – Install ESP32 Board
- Open Arduino IDE → File → Preferences
- Add URL:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json - Tools → Board → Boards Manager → Search "ESP32" → Install
Step 4.2 – Install Required Libraries
Go to Sketch → Include Library → Manage Libraries and install:
- MAX30105 by SparkFun
- Adafruit SSD1306
- Adafruit GFX Library
- Wire (built-in)
5. Complete ESP32 Code (with Explanation)
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <MAX30105.h>
#include "spo2_algorithm.h"
// OLED settings
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
// Sensor object
MAX30105 particleSensor;
// Buzzer pin
#define BUZZER_PIN 25
// Variables for heart rate & SpO2
uint32_t irBuffer[100];
uint32_t redBuffer[100];
int32_t heartRate;
int8_t validHeartRate;
int8_t spo2;
int8_t validSpO2;
// Timing variables
unsigned long lastSensorRead = 0;
const unsigned long sensorInterval = 2000; // Read every 2 seconds
// ========== ROBOT FACE DRAWING FUNCTION ==========
void drawRobotFace() {
display.clearDisplay();
// Draw robot head (rounded rectangle)
display.drawRoundRect(34, 10, 60, 50, 10, SSD1306_WHITE);
// Draw antenna
display.drawLine(64, 10, 64, 2, SSD1306_WHITE);
display.fillCircle(64, 2, 2, SSD1306_WHITE);
// Draw left eye (with glow effect)
display.fillCircle(50, 28, 5, SSD1306_WHITE);
display.fillCircle(50, 28, 2, SSD1306_BLACK); // Pupil
// Draw right eye
display.fillCircle(78, 28, 5, SSD1306_WHITE);
display.fillCircle(78, 28, 2, SSD1306_BLACK); // Pupil
// Draw blinking effect (alternating eyes for cuteness)
static bool blinkState = false;
if(millis() % 2000 < 100) { // Blink every 2 seconds for 100ms
// Eyes closed
display.drawLine(45, 28, 55, 28, SSD1306_WHITE);
display.drawLine(73, 28, 83, 28, SSD1306_WHITE);
}
// Draw mouth (neutral/flat expression)
display.drawLine(54, 45, 74, 45, SSD1306_WHITE);
// Draw ears (bolts on sides)
display.fillRect(30, 25, 4, 8, SSD1306_WHITE);
display.fillRect(94, 25, 4, 8, SSD1306_WHITE);
// Display message
display.setTextSize(1);
display.setCursor(20, 58);
display.println("NO FINGER!");
display.display();
}
// ========== SIMPLE ROBOT FACE (ALTERNATIVE - SMALLER) ==========
void drawSimpleRobotFace() {
display.clearDisplay();
// Head
display.drawRect(44, 15, 40, 35, SSD1306_WHITE);
// Eyes
display.fillCircle(56, 28, 3, SSD1306_WHITE);
display.fillCircle(72, 28, 3, SSD1306_WHITE);
display.fillCircle(56, 28, 1, SSD1306_BLACK);
display.fillCircle(72, 28, 1, SSD1306_BLACK);
// Mouth (sad/neutral for no finger)
display.drawLine(54, 40, 74, 40, SSD1306_WHITE);
// Antenna
display.drawLine(64, 15, 64, 8, SSD1306_WHITE);
display.fillCircle(64, 8, 2, SSD1306_WHITE);
// Message
display.setTextSize(1);
display.setCursor(25, 55);
display.println("Place Finger");
display.display();
}
void setup() {
Serial.begin(115200);
pinMode(BUZZER_PIN, OUTPUT);
digitalWrite(BUZZER_PIN, LOW);
// Initialize OLED
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println("OLED not found");
while(1);
}
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0,0);
display.println("HealthBuddy Ready");
display.display();
delay(2000);
// Initialize MAX30102
if (!particleSensor.begin(Wire, I2C_SPEED_FAST)) {
Serial.println("MAX30102 not found");
while(1);
}
// Configure sensor
byte ledBrightness = 0x1F; // 100% brightness
byte sampleAverage = 4; // 4 samples average
byte ledMode = 2; // Red + IR
int sampleRate = 400; // 400Hz
int pulseWidth = 411; // 411μs
int adcRange = 4096; // 13-bit ADC
particleSensor.setup(ledBrightness, sampleAverage, ledMode, sampleRate, pulseWidth, adcRange);
// Show startup robot face
drawRobotFace();
delay(2000);
}
void loop() {
// Read 100 samples for calculation
for (byte i = 0 ; i < 100 ; i++) {
while (particleSensor.available() == false)
particleSensor.check();
redBuffer[i] = particleSensor.getFIFOIR();
irBuffer[i] = particleSensor.getFIFORed();
particleSensor.nextSample();
}
// Calculate heart rate
maxim_heart_rate_and_oxygen_saturation(irBuffer, 100, redBuffer, &spo2, &validSpO2, &heartRate, &validHeartRate);
// Check if finger is present
bool fingerPresent = false;
// Check if we have valid data AND signal strength is good
if(validHeartRate == 1 && heartRate > 30 && heartRate < 250) {
// Additional check: look for AC component in signal (indicates pulse)
uint32_t signalMin = 0xFFFFFFFF;
uint32_t signalMax = 0;
for(int i = 0; i < 100; i++) {
if(irBuffer[i] < signalMin) signalMin = irBuffer[i];
if(irBuffer[i] > signalMax) signalMax = irBuffer[i];
}
uint32_t signalRange = signalMax - signalMin;
// If there's variation in signal, finger is present
if(signalRange > 5000 && heartRate > 0) {
fingerPresent = true;
}
}
// Display logic with Robot Face
display.clearDisplay();
if(fingerPresent && validHeartRate && heartRate > 30 && heartRate < 250) {
// ========== FINGER DETECTED - SHOW HEALTH DATA ==========
display.setTextSize(1);
display.setCursor(0, 0);
display.println("HealthBuddy");
display.setTextSize(2);
display.setCursor(0, 20);
display.print("BPM:");
display.println(heartRate);
display.setTextSize(1);
// Healthy or Unhealthy?
if(heartRate >= 60 && heartRate <= 100) {
// Healthy
display.setCursor(0, 50);
display.println("Status: HEALTHY");
display.setCursor(90, 45);
display.print(":)");
digitalWrite(BUZZER_PIN, LOW); // Buzzer OFF
} else {
// Unhealthy
display.setCursor(0, 50);
display.println("Status: UNHEALTHY");
display.setCursor(90, 45);
display.print(":(");
// Buzzer pattern for alert
digitalWrite(BUZZER_PIN, HIGH);
delay(200);
digitalWrite(BUZZER_PIN, LOW);
delay(100);
digitalWrite(BUZZER_PIN, HIGH);
delay(200);
digitalWrite(BUZZER_PIN, LOW);
}
}
else {
// ========== NO FINGER - SHOW ROBOT FACE ==========
drawRobotFace(); // Show cute robot face
digitalWrite(BUZZER_PIN, LOW); // Ensure buzzer is OFF
// Optional: Add blinking LED effect for robot eyes (if you have an LED)
// digitalWrite(LED_PIN, millis() % 1000 < 500 ? HIGH : LOW);
}
display.display();
delay(500); // Small delay for stability
}
// ========== BONUS: FUNCTION FOR DIFFERENT ROBOT EXPRESSIONS ==========
void drawRobotFaceWithExpression(String expression) {
display.clearDisplay();
// Head
display.drawRoundRect(34, 10, 60, 50, 10, SSD1306_WHITE);
// Antenna
display.drawLine(64, 10, 64, 2, SSD1306_WHITE);
display.fillCircle(64, 2, 2, SSD1306_WHITE);
// Eyes (always big and cute)
display.fillCircle(50, 28, 5, SSD1306_WHITE);
display.fillCircle(78, 28, 5, SSD1306_WHITE);
display.fillCircle(50, 28, 2, SSD1306_BLACK);
display.fillCircle(78, 28, 2, SSD1306_BLACK);
// Ears
display.fillRect(30, 25, 4, 8, SSD1306_WHITE);
display.fillRect(94, 25, 4, 8, SSD1306_WHITE);
// Mouth based on expression
if(expression == "happy") {
display.drawArc(64, 45, 12, 0, 180, SSD1306_WHITE); // Smile
}
else if(expression == "sad") {
display.drawArc(64, 48, 12, 180, 360, SSD1306_WHITE); // Frown
}
else {
display.drawLine(54, 45, 74, 45, SSD1306_WHITE); // Neutral
}
display.setTextSize(1);
display.setCursor(20, 58);
if(expression == "sad") {
display.println("No Finger!");
} else {
display.println("Place Finger");
}
display.display();
}Explanation:
- The code collects 100 samples from MAX30102.
- Uses standard algorithm (
spo2_algorithm.h) to calculate BPM.- Compares BPM with healthy range (60–100).
- Controls buzzer and updates OLED with emojis + text.
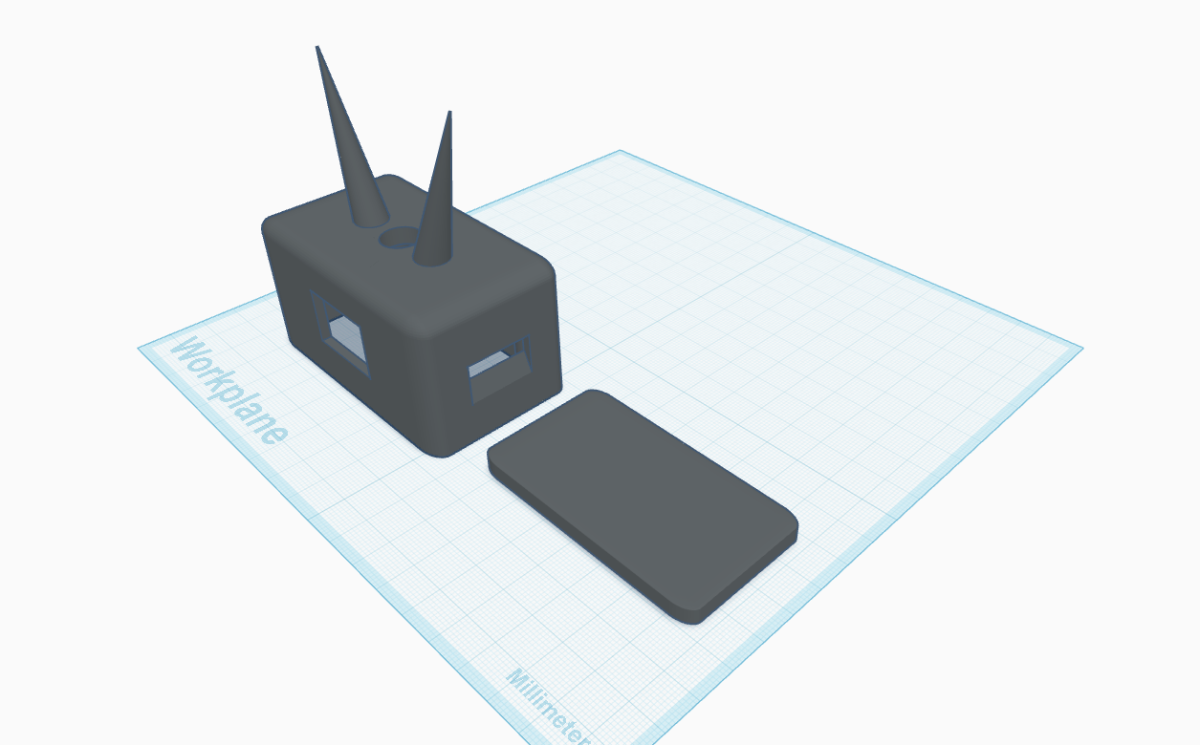
6. Assembly & Physical Build (Professional Look)
To make it look like a finished product (not a breadboard prototype):
- Use a small enclosure (ABS plastic box ~ 8x6x3 cm).
- Cut holes for:
- OLED screen (front)
- MAX30102 sensor (top surface for finger placement)
- Buzzer (side)
- USB port (back)
- Fix components using hot glue or 3D-printed mounts.
- Add a small label – "HealthBuddy" + heart icon.
Pro tip: Use double-sided tape to attach sensor on top so finger rests naturally.
7. Testing & Calibration
Test Case Action Expected Result 1 Power on without finger "Place finger on sensor" 2 Place finger lightly on MAX30102 BPM appears in 5–10 sec 3 Normal BPM (e.g., 75) Happy face, no buzzer 4 Simulate low BPM (tap slowly) Sad face + buzzer beeps 5 Remove finger Returns to Robot Face Calibration tip: Compare with a commercial pulse oximeter for accuracy. Adjust
setup(0x1F)parameter for sensitivity.
8. Final Output – What the User Sees/Hears
Healthy scenario (BPM 72):
- OLED: 😊 + "BPM: 72" + "Status: HEALTHY"
- Buzzer: Silent
Unhealthy scenario (BPM 120):
- OLED: 😞 + "BPM: 120" + "Status: UNHEALTHY"
- Buzzer: Beep – pause – beep
If There is No Finger
- Look like robot
- Desktop Companion
.png)
9. Cost vs. Benefit Analysis
| Parameter | Value |
| Development cost | ~₹1500 |
| Alternative (smartwatch) | ₹3000+ |
| Internet required? | No |
| Mobile app required? | No |
| Time per test | 10 seconds |
| Target users | Students, elderly, desk workers |
| Use Places | Office Desktop, School Desktop, Home Desktop |
10. YouTube Videos:
11. Product Images