


Smart dustbin
Working:-
Ultrasonic Sensors is used to calculate the distance from Dustbin. Whenever the distance between us and Dustbin dips below 30 cm the Lid opens up by turning Servo Motor. As we move away from the dustbin, the lid closes automatically. This can be done with the help of Arduino UNO and Arduino software
Arduino software
Libraries are provided by Arduino itself, but some Libraries are not present by default some we need to add them, in such case we can add them by putting them into the libraries folder. Take the code for Arduino , select Arduino UNO in Tool>Board option, further select COM port, and then burn the code.
Purpose
1) To collect dustbins placed at public places in city.
2) Automatic open-close lid for easy use.
3) There is no contact touch between dustbin and Person so, prevention from germs and diseases.
4) It gives more comfort to peoples
Flow chart
(0).png)
.png)
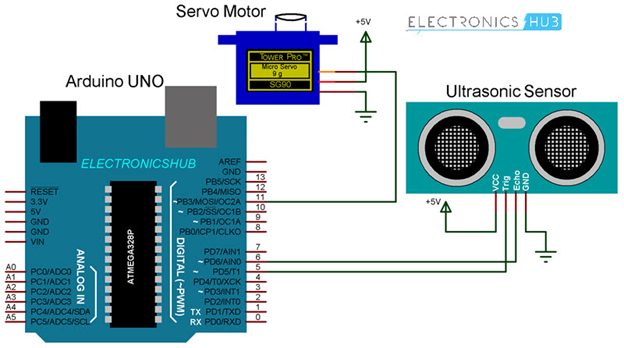
Circuit Diagram
Code
//Funtion : Automatically opens the lid of dustbin when you go near it.
//project title: develop a smart dustbin for street purpose
// Library included
#include<Servo.h> // library for Servo Motors
// defines pins numbers
const int trigPin = 9;//Connect trig pin of UltraSonic Sensor.
const int echoPin = 10;//Connect Echo pin of UltraSonic Sensor.
const int servoPin = 3;//Connect Servo Motor to given pin ( select any PWM pin )
// defines variables
long duration;
int distance;
int Dist;
Servo Servo_Motor;
// Prototype Declaration Section.
int MeasureDistance();
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Servo_Motor.attach(servoPin); // We need to attach the servo to the used pin number
Serial.begin(9600); // Starts the serial communication
}
void loop()
{
Dist = MeasureDistance();
if (Dist < 30)// if distance is less than 30cm
{
open ();// opens the lid of Dustbin When you are near to it
delay (1000);
}
else
{
close(); // Closes the lid of Dustbin When you are far from it.
delay(500);
}
}
void open ()
{
Servo_Motor.attach(servoPin);
Servo_Motor.write(90); // turns the horn of Servo motor by 90 degree from intial position
delay(1000);
Servo_Motor.detach();
}
void close()
{
Servo_Motor.attach(servoPin);
Servo_Motor.write(0); // bring back th horn of servo motor back to its original position
delay(1000);
Servo_Motor.detach();
}
int MeasureDistance ()
{
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance in cm
distance= duration*0.034/2;
return distance;
}
