Aerial Landmine Detection Using Machine Learning
The project aims to address the critical issue of landmine detection, making the process safer, faster, and more efficient through the use of drone technology and machine learning. Extensive research was conducted to gather information on necessary components, technologies, and methodologies. Existing landmine detection methods were studied to identify areas for innovation. A schematic and block diagram of the system were created, detailing the integration of the drone, metal detector, microcontrollers, and the machine learning pipeline.
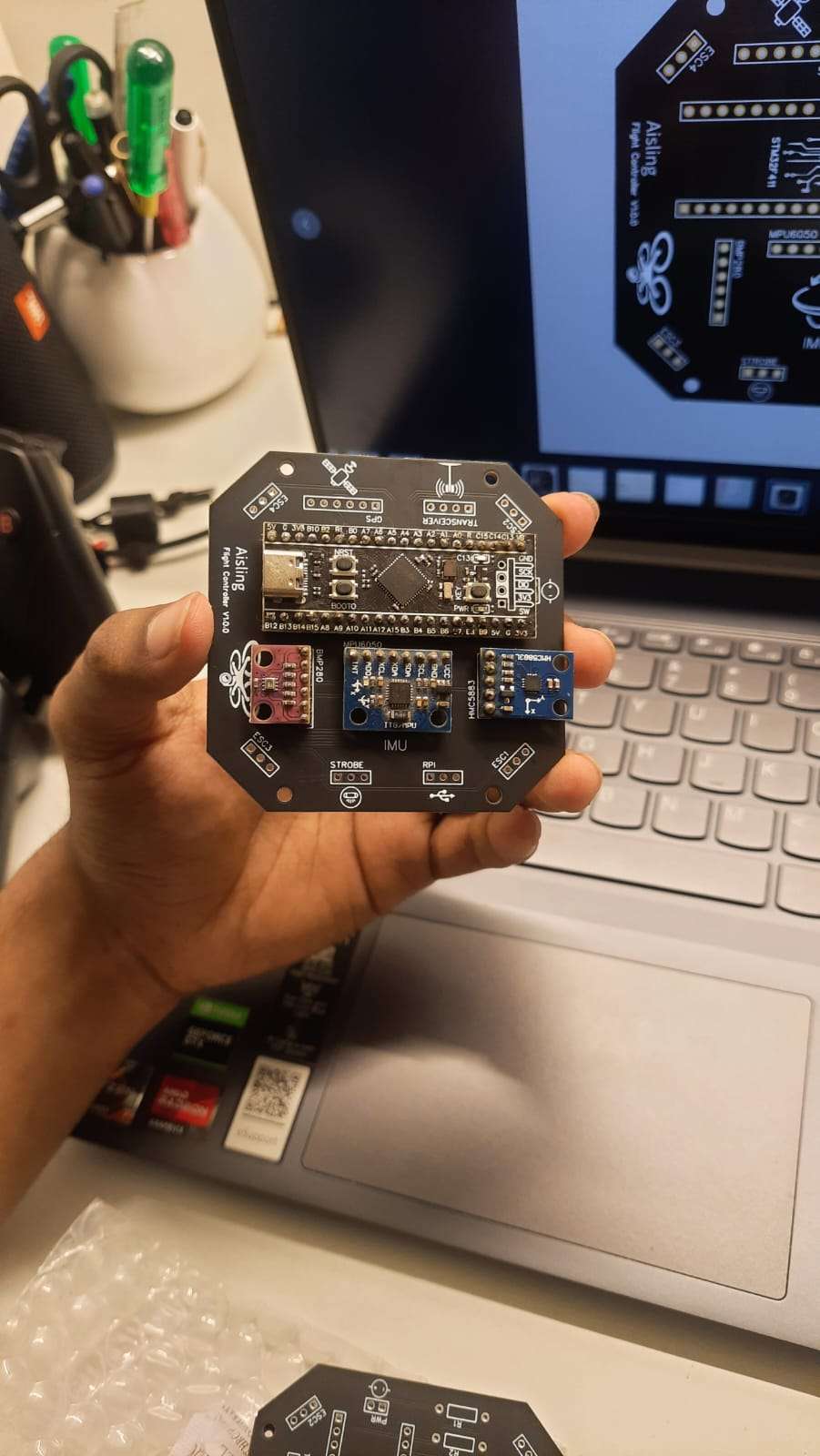
Suitable components for the drone, including the frame, motors, propellers, and mechanical parts, were selected based on project requirements. A custom Flight controller was built using the STM32F411 microcontroller and it was mounted on the drone. This microcontroller handles real-time flight control and sensor data processing. Sensors onboard were MPU6050, BMP180 digital barometer, GY-271 Compass and a Neo M8 GPS module. A Fly sky i6 Transmitter was used to control the drone. A 3 cell Li-po battery was used as a power source that ensured power for all components.

The Raspberry Pi was attached to the drone as the onboard computer. The Robot Operating System (ROS) was set up on the Raspberry Pi for robust control and communication between components. Communication between the Raspberry Pi, STM32F411, and Arduino was established via appropriate interfaces.
The metal detector circuit was assembled using components such as coils, resistors, capacitors, and an Arduino microcontroller. The metal detector was calibrated to accurately detect changes in inductance frequencies when encountering metal objects. The metal detector was secured to the drone using a pendulum-like string setup to maintain stable scanning during flight. Code was written on the Arduino to collect inductance frequency data from the metal detector and send it to the Raspberry Pi.
.jpg)
Data Collection and Training:
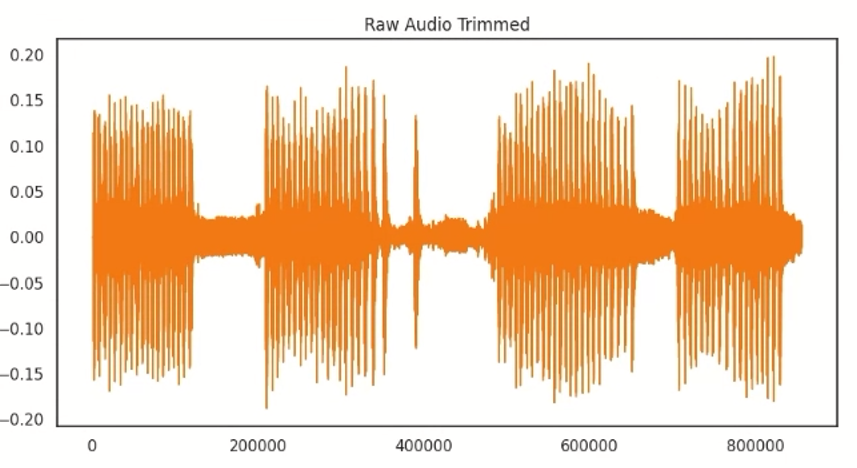
Pseudo metal objects shaped like bombs were used to simulate real landmines. Their inductance frequencies were recorded using the metal detector. A logistic regression model was implemented on the Raspberry Pi to classify and identify potential landmines based on the collected data. The logistic regression model was trained on this dataset to accurately distinguish between harmless objects and potential landmines. The model was tested with additional data to ensure its reliability and accuracy.
.jpeg) Integration and Testing
Integration and Testing
System Integration:
All components (drone, metal detector, microcontrollers, and Raspberry Pi) were integrated to work together seamlessly.
Field Testing:
Test flights were conducted in controlled environments to evaluate the system’s performance in detecting and mapping pseudo landmines.
Create a Visual Map:
The drone was used to scan a designated area and create a real-time visual map showing the flight path and detected objects.
Showcase Results:
The visual map and the system’s detection capabilities were presented, highlighting the accuracy and efficiency of the drone-based landmine detection system.