


IDEA:
According to the survey, 1 in 50 people are living with paralysis and 21 million people are differently-abled. Our ultimate motto is to encourage and support those persons by our techie-machine. From our project, we can achieve end results like
- The person can move anywhere independently without the help of others.
- Their heart rate is continuously measured and monitored by doctors.
- They can call for help by just a simple touch.
ELUCIDATION OF BUILDING BLOCKS:
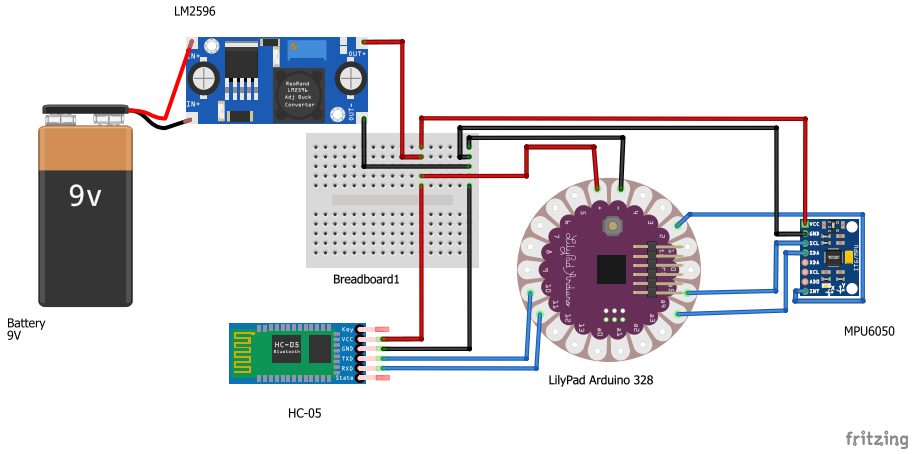
TRANSMITTER SIDE :
- We have a LilyPad of 2.7 V-5.5 V (Operation Voltage) to control all the operations on the transmitter side. We use this because it is washable and reusable. It is sewed on the gloves of the patients. It is small in size. So that the person does not feel uncomfortable.
- MPU 6050 is a 6 axis motion tracking device. Both accelerometer (3 axis)and gyroscope(3 axis) with MEMs technology is embedded in a single chip. It passes the X,Y, Z-axis values through MEMs technology.
- Here we use buck-boost to convert the voltages from 9V to 5V as the voltage constraints of LilyPad is 5.5 V. Hence it protects the component from the burn.
- The usage of a pulse rate sensor is to measure the user's pulse rate.
- HC-05 Bluetooth module is used for master and slave operation.
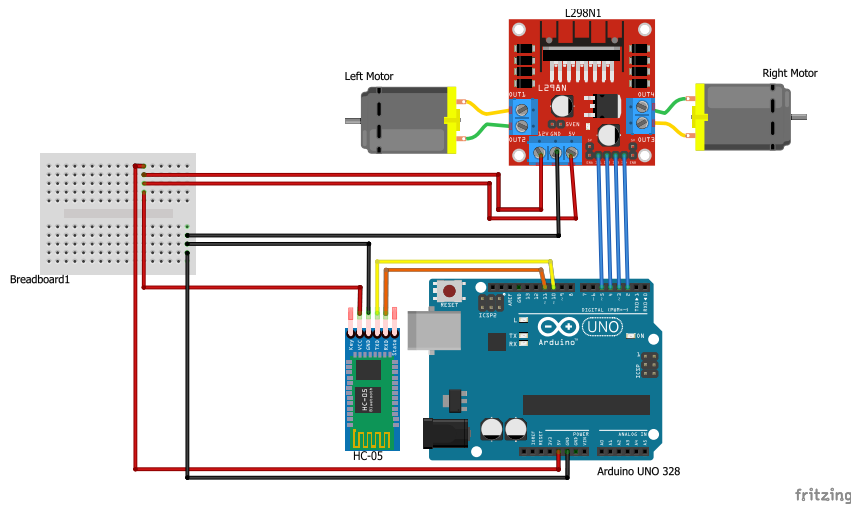
RECEIVER SIDE:
- Here we have Arduino UNO for controlling all the receiver side components. Its versatility encourages everyone to work with it. It can withstand the voltages from 6 V to 20 V.
- L298N is a high power motor driver module for driving DC motors. It can control up to 4 DC motors.
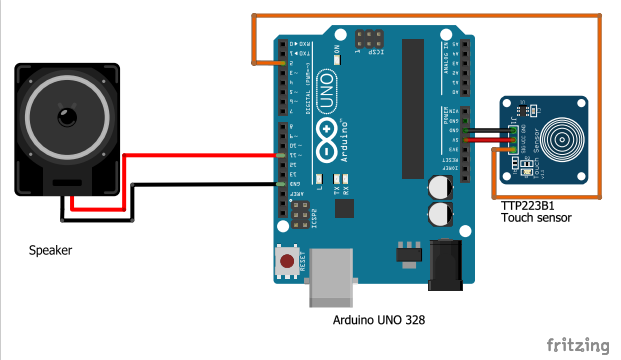
- TTP223B is a touch sensor. For each touch, it will pass a value. Based on the value we can design our own needs.
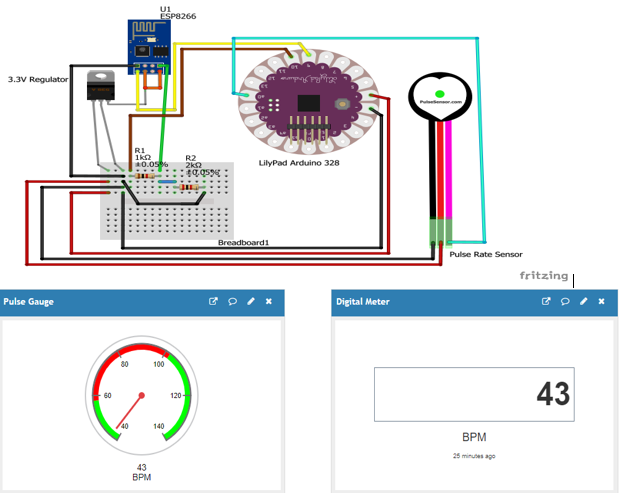
- ESP8266 WiFi Module can give any microcontroller access to Wi-Fi. This is used to upload the value to Thingspeak server from Lilypad.
MAKING:
STEP 1: Pair of HC05 Bluetooth module is taken for master and slave operation. The master is connected to the transmitter part and the slave is connected to the receiver part. These are paired by AT commands.
STEP 2:The LilyPad Arduino is programmed by removing the ATmega328 from Arduino Uno or else we can also use an FT232R to upload sketch in Arduino Boards. Then the MPU6050 and Bluetooth module is connected to the LilyPad. The MPU6050 passes the directional values to LilyPad. Then the commands corresponding to those values are transmitted through Bluetooth.
STEP 3: The L298N driver module is efficient than other motor drivers. The motors are connected to the driver module. The Bluetooth module at the receiver side( slave)Bluetooth, driver module, and indicating LED'S are connected to the Arduino Uno. Once all these are done, the connection between master and slave is established. Now the user can move on their own.
STEP 4:The touch sensor is mounted on the wheelchair and it is connected to the Arduino board. On approaching that, it will make a call for help through speakers. We can design that in any language. First, the desired audio is converted into a 16-bit PCM format through audacity (free software) and the converted file is then encoded. These codes are used in the coding.
STEP 5: The heart rate sensor is connected to Lilypad. We use a separate Lilypad to avoid transmission time lag. This sensor works by the noise elimination circuit. The values from that sensor are uploaded in the Thingspeak server. It helps the doctor or caretaker to monitor the patient's condition at a regular interval.
DEMO:
DRAWBACKS:
We can use this e-chair for differently-abled and paralytic persons of this kind alone.
eg:
- Monoplegia - Affects one of the limbs.
- Hemiplegia - Affects one side of the body.
We cannot use this for patients suffering from Diplegia (affects both arms and limbs) and psychological disorders.
FURTHER IMPLEMENTATION:
- Our ultimate motto is to implement this in real-time, to help the required people.
- We have to achieve better battery life and efficiency.
- Working on further implementation of the bio-metric lavatory.