
Video
ABSTRACT
This proposed idea presents an advanced defense robot to address the critical need for efficient and autonomous threat detection and neutralization in security-sensitive environments. The autonomous defense robot is designed to enhance security by identifying and responding to threats with high precision. The robot ensures agile and accurate movements by utilizing precise control mechanisms for its servomotors. Powered by a Raspberry Pi 4 Model B with 8GB RAM, the system runs advanced image processing and navigation algorithms and incorporates the Robot Operating System (ROS) package as its core framework. Path planning and obstacle avoidance are enhanced by the implementation of the DWA Local Planner, ensuring dynamic and safe navigation. The robot's environment perception is facilitated by a Logitech camera for mapping and an RP RpLidar A2M12, enabling real-time 3D mapping and environmental awareness. For threat identification, a Real Sense Depth Camera is employed, allowing precise and reliable detection. Communication between the control units is established via MQTT, providing reliable and secure data transmission to headquarters. Sensor fusion techniques, including an Extended Kalman Filter (EKF) integrating GPS, IMU, gas, and temperature sensors, enhance the robot's localization and operational accuracy. Additionally, deep learning algorithms, particularly YOLO V8, are employed for image processing and precise threat identification. The robot's adaptive shooting mechanism, powered by BLDC motors, ensures swift and accurate responses to identified threats, minimizing collateral damage. This study presents a smart, autonomous solution tailored for defense applications, significantly enhancing security and operational efficiency in various environments.
1. INTRODUCTION
Autonomous Mobile Robot with integrated defense capabilities. An Autonomous Mobile Robot (AMR) with integrated defense capabilities is a sophisticated device designed to autonomously navigate and patrol various environments, enhancing security and reducing human risk. It utilizes advanced sensors such as LIDAR, depth cameras, and IMU sensors to map its surroundings and avoid obstacles. The robot's mobility is powered by high-precision DC motors, ensuring smooth and controlled movement. Central to its operation is a Raspberry Pi 4 with 8GB RAM, which processes sensor data in real time for effective decision-making. The AMR is equipped with high-definition cameras and specialized sensors, including gas and temperature sensors, to detect and identify potential threats. Once a threat is confirmed, the robot communicates with headquarters through secure channels to report its findings and receive further instructions. If authorized, the integrated shooting mechanism, controlled by servo motors and BLDC motors, can neutralize the identified threats. The robot is powered by a high-capacity Li-Po battery, with voltage regulation provided by buck converters. Cooling fans are installed to prevent overheating of critical components, ensuring reliable operation in various conditions. This AMR is particularly suited for border security applications, where it can autonomously patrol designated areas, detect and report threats, and take necessary action under remote command, thereby significantly enhancing safety and operational efficiency.
2. ROBOT ASSEMBLY DESIGN
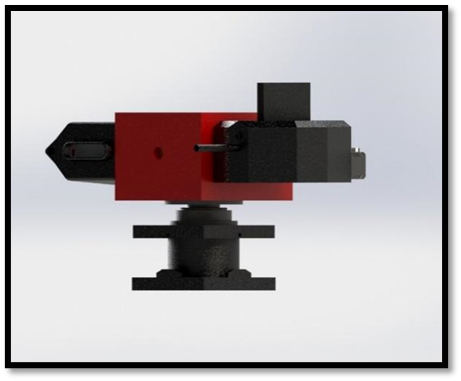
Shooting Mechanism Design:
AMR Design:
.png)
Complete Design of the Bot:
.png)
Circuit Diagram of the AMR:
.png)
3.1 List of Structure Components
3.1.1 Dc Motor
These motors enable us to navigate through diverse landscapes with ease, from rugged mountainsides to sandy deserts. Their adaptability ensures efficient performance across different terrains, enhancing our mobility and operational capabilities. With DC motors at our disposal, we can confidently tackle any terrain, overcoming obstacles and reaching our destination reliably.
3.1.2 Servo
The servo motor plays a crucial role in adjusting the angle of the depth camera, enabling precise control over its field of view. By manipulating the servo motor, the orientation of the depth camera can be altered to capture specific areas or objects with accuracy. This capability enhances the versatility of the depth camera, allowing it to adapt to different environments and scenarios.
3.1.3 Stepper
The stepper motor plays a crucial role in adjusting the angle of the turret system precisely and efficiently. Its ability to move in discrete steps allows for accurate positioning of the turret, ensuring precise targeting or alignment as needed.
3.1.4 Battery
We are utilizing a 16000mAh capacity Li-Po battery for our AMR defense robot. With its substantial power reserve, this battery ensures prolonged operation and endurance during critical missions. The high capacity of the battery enables our robot to maintain peak performance for extended periods, enhancing its effectiveness in defending against threats. This Li-Po battery's reliability and efficiency contribute significantly to the overall functionality and readiness of our defense system.
3.1.5 Wheel
We are using custom-made wheels for robot movement. These wheels are specifically designed and manufactured to meet the unique requirements of our robotic system, ensuring optimal performance and efficiency.
3.1.6 BLDC Motor
BLDC motors can be controlled with great precision, allowing for accurate control of the shooting mechanism's speed and position. This precision is essential for aiming and firing projectiles effectively in a defense bot. KV: 2450KV
3.2 List of Motion Components
3.2.1 Bearings
We use bearings to minimize friction in a BLDC motor that operates at 4900kv. These bearings are crucial for ensuring the smooth rotation of the motor and maintaining its efficiency. Additionally, bearings play a vital role in the rotating turret mechanism, reducing wear and tear.
3.2.2 Spur Gear
We are using a spur gear to increase the speed of a BLDC motor at a 1:2 ratio. This setup allows us to achieve a speed of 4950 KV. Such a high speed is particularly useful for shooting enemies. The increased speed provides a significant advantage in targeting and impact.
3.3 List of Electronics Components
3.3.1 Raspberry Pi
We are utilizing Raspberry Pi for image processing and robot navigation, as well as path planning for an AMR robot. The Raspberry Pi serves as the central processing unit for these tasks, enabling efficient computation and decision-making. Through image processing, the robot can perceive its environment, while navigation algorithms on the Raspberry Pi guide its movement. Additionally, path planning algorithms running on the Raspberry Pi optimize the robot's route for efficiency and obstacle avoidance.
3.3.2 Real Sense Depth Camera
We are utilizing a Real Sense depth camera for threat detection or any terrorist attack at military borders through image processing. The Real Sense depth camera is deployed to identify potential terrorist activities along the borders. By leveraging its advanced capabilities, we can enhance border security with precise and real-time threat detection. The detailed depth information provided by the camera is crucial for identifying suspicious activities. Its integration into our defense system significantly improves the accuracy of monitoring and analyzing images for threats.
3.3.3 Logitech Camera
Utilizing a Logitech camera, the robot can effectively map its surroundings and plan its route. The integration of the Logitech camera enhances the robot's ability to navigate complex environments and terrains. The robot can detect and avoid obstacles during its path-planning process. The camera gathers real-time data that is immediately transmitted to headquarters.
3.3.4 Lidar
Utilizing RPLIDAR (Light Detection and Ranging) for 3D mapping and localization, enabling obstacle avoidance. By integrating RPLIDAR into our system, we enhance spatial awareness and ensure precise navigation. With its advanced sensing capabilities, RPLIDAR facilitates real-time detection of obstacles, enhancing safety and efficiency.
Scanning Range: 18M Radius
Detection Range: 12M Radius
3.3.5 Dc Motor Driver
This driver ensures efficient power delivery to the motor, enhancing its performance. The motor driver regulates the speed and direction of the wheel, enabling precise control over its movement. With this setup, our vehicle achieves smooth and reliable operation. The integration of the DC motor driver significantly enhances the functionality and responsiveness of the wheel system.
3.3.6 Stepper Driver
We are utilizing a stepper driver for the stepper motor in the turret. This driver ensures precise control over the motor's movements. With its advanced features, we can achieve accurate positioning of the turret mechanism. The stepper driver enhances the overall performance and reliability of the turret system. Its integration optimizes the functionality of our turret for smooth operation.
3.3.7 IMU Sensor
We are using a BNO-055 IMU sensor to determine the current position of the robot. This sensor helps in tracking the robot's orientation, acceleration, and angular velocity. By integrating the data from the IMU, we can accurately estimate the robot's movement and position over time. This information is crucial for ensuring precise navigation and control of the robot.
3.3.8 Gas Sensor
Utilizing a gas sensor to detect hazardous gases in the mission zone, the system will continuously monitor air quality. Any detection of hazardous gases will trigger an alert, promptly notifying the personnel on site. Simultaneously, real-time data will be transmitted to headquarters for analysis and decision-making. This ensures immediate response to potential dangers, enhancing the safety of the mission.
3.3.9 Temperature Sensor
Using a temperature sensor to monitor the temperature in the patrol zone. This sensor provides real-time data, allowing us to ensure optimal conditions. Regular monitoring helps us detect any anomalies early. By keeping the temperature within the desired range, we maintain the safety and efficiency of the mission.
3.3.10 Relay
Using a relay to control the LED light. The relay acts as a switch that can turn the LED on and off. By sending a signal to the relay, we can easily manage the LED's power. This will allow for efficient control of the lighting system.
3.3.11 Buck Converter
Buck converter to step down the voltage from 12V to 5V for Raspberry Pi. This voltage conversion is crucial to ensure the proper operation of the device. The buck converter efficiently reduces the higher voltage to a stable 5V output.
3.3.12 GPS
We are utilizing GPS for outdoor navigation of autonomous mobile robots (AMRs).By integrating GPS with our AMRs, we can enhance their operational efficiency and reliability. The GPS system provides real-time location data, which is essential for precise movement and obstacle avoidance.
3.3.13 Battery Indicator
A battery level indicator is a device or feature that provides information about the remaining charge or voltage level of a battery. It helps us monitor the status of their batteries and gauge when they need recharge.
3.3.14 Emergency Switch
In the event of an AMR failure or malfunction, we utilize an emergency switch to ensure safety and continued operation. This switch acts as a backup to mitigate any risks associated with the automated system's downtime. By manually activating the emergency switch, operators can maintain control and prevent potential hazards.
3.3.15 ESC
ESC (Electronic Speed Controller) to regulate the speed of the BLDC (Brushless DC) motor. The ESC allows us to precisely control the motor's speed by adjusting the power supplied to it. This setup ensures smooth operation and improves the motor's performance.
4. METHODOLOGY OF ROBOT
4.1 DWA Local Planner for Path Planning
The DWA local planner algorithm is a sophisticated method used in robotics for planning a robot's path. It considers both the environmental obstacles and the dynamics of the robot itself to generate an optimal trajectory. The goal is to minimize a cost function, t J, which represents a measure of how well the generated trajectory satisfies certain criteria, subject to various constraints.
The general formulation of the optimization problem solved by the DWA local planner can be expressed as :
.png)
Here, the symbols represent the following:
J: The cost function to be minimized, which is often a measure of the path's quality or efficiency.
L(x(t),u(t),t): The Lagrangian function, representing the local cost at each time step, typically defined in terms of the state x(t) x(t), control input u(t) u(t), and time t.
x(t): The state of the system at time t t, describing the robot's position, velocity, and possibly other relevant variables.
u(t): The control input applied to the system at time t t, determining the robot's actions or motions.
x ˙ (t): The derivative of the state x(t) x(t) with respect to time, representing the system dynamics.
f(x(t),u(t),t): The dynamics function, specifies how the state evolves based on the current state, control input, and time.
t0 and tf: The initial and final time points, respectively, defining the time interval over which the optimization is performed.
The objective of the optimization problem is to find the state trajectory x(t) and control input trajectory u(t) that minimizes the integral of the Lagrangian function L(x(t),u(t),t) over the time interval from t0 to tf while satisfying the system dynamics constraint (t)=f(x(t),u(t),t).
In the DWA local planner algorithm, this optimization problem is solved iteratively to generate a trajectory that navigates the robot from its current position to a goal position while avoiding obstacles and considering the robot's dynamics. The specific form of the cost function J, Lagrangian function L, and dynamics function f would be tailored to the requirements and characteristics of the robot and its environment
DWA Workflow
.png)
.png)
4.2 EXTENDED KALMAN FILTER (EKF)
Integrating an Extended Kalman Filter (EKF) for sensor fusion in autonomous defense robot. The seamless combination of data from GPS, IMU, gas, and temperature sensors. The EKF enhances the robot's ability to accurately track and respond to its environment by filtering and merging these diverse sensor inputs. This integration provides robust and reliable state estimation, essential for navigation, threat detection, and operational efficiency. By leveraging the strengths of each sensor, the EKF ensures optimal performance, enabling the autonomous defense robot to execute its missions with heightened precision and adaptability.
.png)
4.3 MQTT
Integrating MQTT with the defense robot enables us to transmit its coordinates to headquarters efficiently. This integration allows real-time monitoring and precise tracking of the robot's movements. The use of MQTT ensures a reliable and secure communication channel, minimizing the risk of data loss or interception. By providing constant updates on the robot's location, headquarters can make informed decisions, enhance operational efficiency, and respond promptly to any emerging threats.
4.4 NODE-RED
Using Node-RED to create a dashboard, the data received from the robot is displayed to the headquarters. By integrating Node-RED with the robot’s data streams, the headquarters can track activities, detect anomalies, and address issues promptly, ensuring optimal performance and minimizing downtime. This ensures that the headquarters can make informed decisions quickly, improving operational efficiency and response times
4.5 DEEP LEARNING
Utilizing deep learning algorithm for image processing and threat detection using Yolo V8. Through advanced neural networks, the robot scans its surroundings with unparalleled precision, swiftly identifying potential threats amidst complex environments. Upon detecting a threat, the robot's response is immediate and decisive. The orientation of its turret and shooting mechanism dynamically adjusts, aligning itself with the perceived danger. This seamless adaptation ensures that the robot can effectively neutralize threats with optimal speed and accuracy.
Moreover, by integrating deep learning into the robot's shooting mechanism, which rotates along two axes. we enhance its agility and responsiveness in engaging threats from multiple directions. This adaptive approach not only improves the effectiveness of our defense capabilities but also minimizes the risk of collateral damage by precisely directing firepower toward identified threats.
The integration of deep learning technology not only enhances the robot's threat detection capabilities but also enables it to adapt to evolving security challenges. Through continuous learning and refinement of its algorithms, the robot remains at the forefront of defense, providing reliable protection in diverse scenarios. our autonomous defense robot is equipped with the ability to swiftly and accurately analyze visual data, enabling it to detect potential threats with remarkable efficiency.
Workflow of the Shooting Mechanism:
.png)
Workflow of the AMR:
.png)
step 1. Chassis Design and Material Selection
- Design: Use SolidWorks to create a detailed CAD model of the robot’s chassis. Ensure that the design accommodates all components, provides stability, and meets the project’s requirements.
- Material Selection: Choose aluminum profiles for structural support and aluminum sheets for the main body due to their lightweight and durable properties.
step 2. Cutting and Shaping
- Aluminum Sheets: Manually cut the aluminum sheets according to the CAD design, ensuring precision and smooth edges. Use appropriate cutting tools such as metal shears or a hacksaw.
- Profiles: Cut aluminum profiles to the required lengths for the frame and support structures, ensuring precise measurements.
step 3. Drilling and Slotting
- Drilling: Drill holes in the aluminum sheets and profiles for mounting motors, sensors, controllers, and other components. Ensure accurate placement and alignment of the holes for easy assembly.
- Slotting: Create any necessary slots or channels for wiring and component placement, using hand tools or a milling machine if available.
step 4. Assembly
- Frame Assembly: Assemble the frame using the aluminum profiles. Connect the profiles using screws and brackets, ensuring a sturdy and stable structure.
- Component Mounting: Mount the aluminum sheets onto the frame to form the main body. Securely attach motors, sensors, and the microcontroller to the chassis using screws and brackets. Ensure all components are firmly in place.
step 5. Wiring and Electronics Integration
Carefully route all wiring for power and data signals, ensuring they are securely fastened and protected from damage. Use cable ties and protective tubing to organize and protect the wires.
step 6. Component Integration
- Microcontroller Setup: Mount the Raspberry Pi 4 Model B (with 8GB RAM) securely onto the chassis, ensuring it is easily accessible for wiring and maintenance.
- Power Connections: Connect the Li-Po battery to the Raspberry Pi. Use buck converters to step down the voltage as needed.
- Motor Controllers: Connect motor controllers to the Raspberry Pi. Ensure each motor (DC, servo) is correctly wired to its controller.
- Sensor Integration: Attach sensors (LIDAR, depth cameras, IMU, gas, and temperature sensors) to the Raspberry Pi. Ensure secure and correct connections for reliable data transmission.
- Defense Mechanism: Integrate the defense mechanism control system with the Raspberry Pi. Connect servo motors to GPIO pins for precise control and ensure the firing mechanism is securely wired and tested.
step 7. Wiring and Cable Management
- Cable Routing: Neatly route all wires, securing them with cable ties and protective tubing. Ensure wires are organized and do not interfere with moving parts.
- Power Distribution: Ensure that all components receive appropriate power levels, using buck converters where necessary to step down voltage.
- Data Connections: Verify all data connections between sensors, motors, and the Raspberry Pi. Double-check connections to avoid loose wires and potential short circuits.
step 8. Software Development and Configuration
- Operating System: Install the Ubuntu OS on the Raspberry Pi.
- Robot Operating System (ROS): Install and configure ROS to manage the robot’s control systems, sensor integration, and communication.
- Driver Installation: Install drivers for all connected hardware, including motor controllers and sensors. Ensure each component is recognized and functioning correctly.
- Path Planning and Navigation: Implement path planning algorithms such as the DWA Local Planner to enable efficient navigation and obstacle avoidance.
- Image Processing and Threat Detection: Use deep learning framework TensorFlow to implement YOLO V8 for real-time image processing and threat detection. Integrate the model with the ROS framework.
- Communication Protocol: Set up secure communication channels using MQTT for data transmission between the robot and headquarters. Ensure data is encrypted and transmitted reliably.
5. APPLICATION OF THE ROBOT:
The AMR defense robot enhances security in several societal contexts. It autonomously patrols borders, reducing the risk to human patrols in dangerous areas. In military zones, it provides surveillance and rapid threat response, ensuring personnel safety. The robot secures critical infrastructure such as power plants and communication centers with continuous monitoring, preventing potential sabotage or attacks. It monitors large sites in industrial settings to prevent unauthorized access and detect hazards, improving overall safety and operational efficiency. This versatile robot thus significantly contributes to public safety and national security.
➢Border Security
➢ Military Zones
➢Industrial Security
6. SIZE OF ROBOT:
| Length | 46cm |
| Width | 30cm |
| Height | 50cm |
7. Milestones:
End of Week 1: Initial mechanical assembly and fabrication started, electronic integration started, deep learning models were chosen.
End of Week 2: Mechanical assembly, fabrication, and electronic integration continued, deep learning model training started, and control algorithms and sensor fusion techniques developed.
End of Week 3: Mechanical assembly, fabrication, and electronic integration completed, deep learning model training continued, hardware and software components integrated.
End of Week 4: Fabrication completed, deep learning model training continued, control algorithms and sensor fusion techniques refined, initial testing conducted.
End of Week 5: Unit testing and integration testing are ongoing.
End of Week 6: Integration testing continued; simulation testing started.
End of Week 7: Fabrication, integration testing completed, simulation testing, and deep learning model validation ongoing.
End of Week 8: Field testing conducted, final adjustments, deployment, and initial monitoring set up.
8. PROJECT OUTLINE:
8.1. Introduction
➢Project Title: Autonomous Mobile Robot (AMR) with Integrated Defense Capabilities
➢Objective: Enhance security through autonomous patrolling and threat neutralization.
➢Scope: Focus on border security, military zones, and industrial security.
8.2. Significance
➢Problem Statement: Address the need for advanced security measures in high-risk areas.
➢Significance: Reducing human risk, enhancing operational efficiency, and ensuring rapid response to threats.
8.3. Methodology
➢Path Planning: DWA Local Planner for optimal trajectory generation.
➢Sensor Fusion: Extended Kalman Filter (EKF) for integrating data from multiple sensors.
➢Threat Detection:
- Deep Learning:
- Model Selection: Uses state-of-the-art deep learning models for object detection and threat identification.
➢Shooting Mechanism:
Reorients the shooting mechanism towards the target from the data taken from the human detection.
8.4. Applications
➢ Border Security
➢Military Zones
➢Industrial Security
8.5. Conclusion
Our project aims to contribute to enhancing security measures by providing an effective and autonomous solution for threat detection, while also showcasing the capabilities of interdisciplinary collaboration in addressing complex engineering challenges. We are confident that with our expertise and dedication, we will successfully deliver an autonomous robotics system that meets the highest standards of performance and reliability.