
Smart Compass
A normal compass is boring (just points north), lets make something smarter that points to any required place and locks itself in that direction.
Story
Imagine yourself in a situation when somehow you can't use Google Maps App on your phone and want to navigate to nearest petrol pump as you don't have enough fuel. Our general compass just points towards north. I decided to make a smart compass, that will point to the nearest desired place selected using keypad. This device will not only point to the location but also lock the needle in that direction, which will still show correct direction even if we take turns.
Build
The device is build using cardboard, which acts as the main base. The dial with the markings is also made up of cardboard for easy prototyping. The raspberry pi zero 2W , byj28 stepper motor and its driver are all housed inside the cardboard base. The keypad to select the place is attached on top of the base just below the dial.
The power bank to power the whole device is attached to bottom of the base using double sided adhesive tape and some plastic straps.

Software Tools/Technologies
1. Python Language
Website -> https://www.python.org/
Python is a high-level, general-purpose programming language. In this project it was used to integrate the whole project software application.
Major Libraries used -
| Name | Use |
| RPi.GPIO | For configuring GPIO pins and to drive the stepper motor |
| socket | Used to receive packets from HyperIMU App containing heading values |
| googlemaps | For using Google Maps API to get nearest desirable place coordinates |
| math | To calculate the heading & bearing angle values using trigonometric functions |
| argparse | To parse input argument values |
2. Docker
Website -> https://www.docker.com/
Docker is a platform that makes use of OS-level virtualization to provide a software application in containers.
Docker makes it easy to develop and ship application. It packages all the code and its dependencies together in single docker image.
Docker Hub Image link for this project ->
https://hub.docker.com/repository/docker/yashindane/smartcompass/general
3. Google Maps API

Google Maps API lets you connect to Google Maps platform, and the use Maps services using a programming language like Python.
Website -> https://developers.google.com/maps
Usage
Set HyperIMU app on android phone to send UDP packets to the PI. Select orientation and GPS values in packet settings. Attach the phone to the device, such that the phone points towards the tip of the needle. The pi uses the orientation sensors inside the phone to determine its orientation. This values are streamed to the PI using HyperIMU.
Press the button on keypad for desired nearest location.
The buttons correspond to this nearest different places ->
1 - Automobile Service
2 - Hospital
3 - Police Station
4 - Petrol Pump
A - Mall
5 - Pizza
6 - Bank
B - Post Office
7 - Stadium
8 - Railway Station
C - Airport
* - Hotel
0 - Restaurant
# - School
D - Reset
( Note - For the needle to return to 0 degree mark, press the Reset button )
Prerequisites
The whole Python application is packaged in a Docker image. So Docker installation is required.
Docker installation -
$ sudo curl -fsSL https://get.docker.com -o docker-install.sh
$ sh docker-install.sh
$ sudo usermod -aG docker pi
$ sudo reboot
Pulling Docker image from Docker Hub -
$ sudo docker pull --platform linux/arm64/v8 docker.io/yashindane/smartcompass:latest
Running the container -
$ sudo docker run -it --platform linux/arm64/v8 --name smartcompass-con.$(date "+%Y.%m.%d-%H.%M.%S") --net=host --device /dev/gpiomem yashindane/smartcompass:v2 --ip="<IPV4-OF-PI>" --port=<UDP-PORT> --key="<GOOGLE-MAPS-API-KEY>" --keypad_rows="16,20,21,5" --keypad_cols="6,13,19,26" --motor_pins="17,18,27,22"( Note - One needs to have a active Google Maps API Key )
Working
The PI continuously scans the keypad for a button press. Once a button is pressed, using Google Maps API nearest corresponding location place coordinates and name are fetched.
Sample of code from gmapintegration.py that does the coordinates fetching -
loc_string = ",".join(loc)
gmaps_client = googlemaps.Client(key=api_key)
place_result = gmaps_client.places_nearby(location=loc_string, keyword=place, rank_by="distance")
nearest_place = place_result["results"][0]
nearest_place_lat = nearest_place["geometry"]["location"]["lat"]
nearest_place_lng = nearest_place["geometry"]["location"]["lng"]
nearest_place_name = nearest_place["name"]
nearest_place_vicinity = nearest_place["vicinity"]
Next the Pi calculates the Bearing Angle, using the coordinates fetched and the device coordinates received from HyperIMU stream.
What is Bearing Angle?
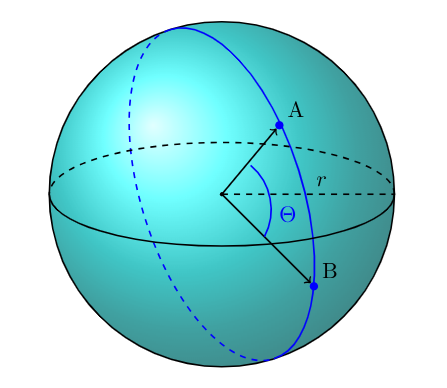
It is the angle between the North-South direction line and the line connecting the current position point and destination position point.
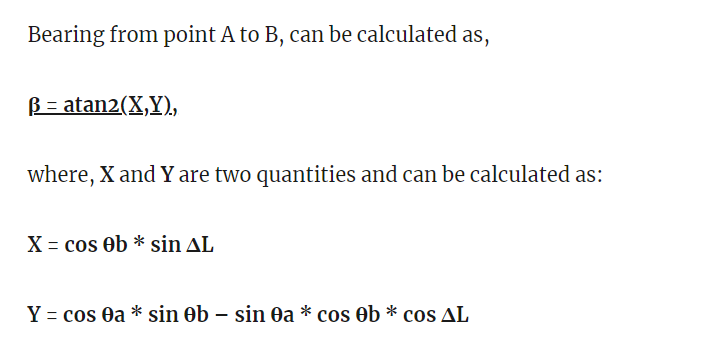
Sample Code from gmapintegration.py computing the Bearing angle -
a = [math.radians(x) for x in a]
b = [math.radians(x) for x in b]
diffLong = b[1]-a[1]
X = (math.cos(b[0]))*(math.sin(diffLong))
Y = math.cos(a[0])*math.sin(b[0])-math.sin(a[0])*math.cos(b[0])*math.cos(diffLong)
B = math.atan2(X, Y)
BEARING_ANGLE = math.degrees(B)
Then according to the device orientation, the final angle is calculated. This final angle is fed to stepper driver and the needle moves.
After the needle points to the required direction, the needle gets locked in that direction. To return back to 0 degree mark, press reset button.
Applications
This device can be mainly used in emergency cases for quick navigation to nearest required emergency services.
This can be a good substitute to Google Maps App, although it only points towards the direction.
Future Developments
We can add a lot of more features to this-
- Adding a LCD Display to show name of the place we are looking for
- Adding a Mechanical keypad for robustness
- Making a more good design using 3D printing
Conclusion
This device can be used to quickly get the direction of a required place so that we can navigate to it, in case of emergency situation.