
How I build the project?
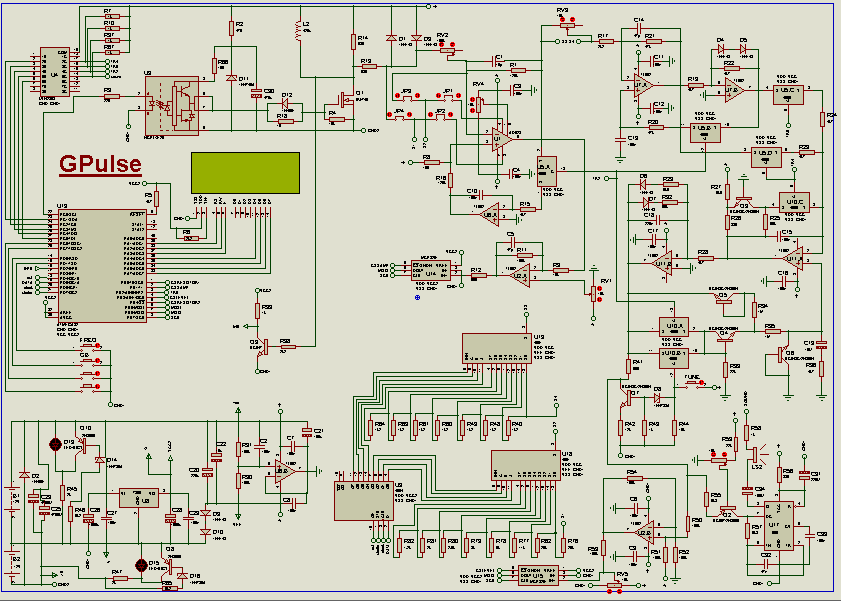
1- I drew the circuit .
2- programed the Microcontroller .
/*******************************************************
This program was created by the
CodeWizardAVR V3.14 Advanced
Automatic Program Generator
© Copyright 1998-2014 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 25/01/2022
Author : wafik rkab
Company :
Comments:
Chip type : ATmega32A
Program type : Application
AVR Core Clock frequency: 8.000000 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 512
*******************************************************/
#include <mega32a.h>
#include <iobits.h>
#include <string.h>
#include <stdio.h>
#include <delay.h>
#include <alcd.h>
#include <spi.h>
#include <i2c.h>
#include <math.h>
#include <stdlib.h>
#define TR2 PORTC.3
#define TR3 PORTC.0
#define TR4 PORTC.1
#define TR5 PORTC.2
#define SOUND PORTC.4
#define FREQ PIND.1
#define GB PIND.0
#define csResistor1 PORTB.0
#define csResistor2 PORTB.4
#define csSamp PORTB.1
#define csLevel PORTB.3
#define SDI PORTB.5
#define CLK PORTB.7
////////////////////////////////////////
#define OUTEN PORTD.4
#define DISPDATA PORTD.5
#define DISPCLK PORTD.6
#define STROBE PORTD.7
unsigned char tmp;
int FreqVal=10000;
int power=160,delay=90,renage=160;
int actDelay,actPower;
char state=1,str[16],index=0,i=0;
unsigned int readSampAdc,readLevelAdc;
long int sampTotal=0,levelTotal=0,sampAdc=0,levelAdc=0;
unsigned char sampCount=0,levalCount=0,sampHi,sampLow,levelHi,levelLow;
//void writeMCP4921(unsigned int data)
// {
// unsigned char l,h;
// PORTB.1=1;//CS1=1
// PORTB.3=1;//LDAC=1
// PORTB.4=1;//CS0=1
// delay_ms(1);
// PORTB.4=0;//CS0=0
// h=data>>8;
// h=h|0x70; //0x50 vout=2*ref 0x70 vout=ref
// l=data;
// spi(h);
// spi(l);
// PORTB.4=1;//CS0=1
// PORTB.3=0;//LDAC=0
// delay_ms(1);
// PORTB.3=1;//LDAC=1
// }
//unsigned int readMCP3201()
//{
// PORTB.1=1;//CS1=1
// PORTB.1=0;//CS1=0
// PORTB.4=1;//CS0=1
// hi = spi(0);
// low= spi(0);
// hi = (hi & 0x0f);
// adc =hi;
// adc=adc<<8;
// adc =adc|low;
// // dato = M0 / 16;
// // Va = (dato) * 5.0 / 4096.0/2.0;
// return adc;
//}
//get samp.............................
//interrupt [EXT_INT0] void ext_int0_isr(void)
//{
//
// delay_us(4);
// csLevel=1;
// csResistor1=1;
// csResistor2=1;
// csSamp=1;//samp
// csSamp=0;
// sampHi = spi(0);
// sampLow= spi(0);
// sampHi = (sampHi & 0x0f);
// readSampAdc =sampHi;
// readSampAdc=readSampAdc<<8;
// readSampAdc =readSampAdc|sampLow;
// sampAdc=readSampAdc;
// // sampTotal=sampTotal+(long int)readSampAdc;
//// if(++sampCount==32)
//// {
//// sampAdc=sampTotal>>5;
//// sampCount=0;
//// sampTotal=0;
//// }
//}
interrupt [EXT_INT2] void ext_int2_isr(void)
{
switch(index)
{
case 0:delay_us(75);break;
case 1:delay_us(10);break;
case 2:delay_us(20);break;
case 3:delay_us(4);break;
}
csLevel=1;
csResistor1=1;
csResistor2=1;
csSamp=1;
csLevel=0;
levelHi = spi(0);
levelLow= spi(0);
levelHi = (levelHi & 0x0f);
readLevelAdc =levelHi;
readLevelAdc=readLevelAdc<<8;
readLevelAdc =readLevelAdc|levelLow;
levelAdc=readLevelAdc;
// levelTotal=levelTotal+(long int)readLevelAdc;
// if(++levalCount==32)
// {
// levelAdc=levelTotal>>5;
// levalCount=0;
// levelTotal=0;
// }
}
interrupt [TIM1_COMPA] void timer1_compa_isr(void)
{
switch(state)
{
case 1:TR2=0;TR3=0;TR4=1;TR5=1;OCR1A=80; break;
case 2:TR2=1;TR3=1;TR4=1;TR5=1;OCR1A=power; break;
case 3:TR2=1;TR3=0;TR4=1;TR5=1;OCR1A=delay; break;
case 4:TR2=1;TR3=0;TR4=0;TR5=1;OCR1A=45; break;
case 5:TR2=1;TR3=0;TR4=1;TR5=1;OCR1A=renage; break;
case 6:TR2=1;TR3=0;TR4=1;TR5=0;OCR1A=45; break;
case 7:TR2=1;TR3=0;TR4=1;TR5=1;OCR1A=(FreqVal-(80+power+delay+45+renage+45)); break;
};
if(++state==8)state=1;
}
//void writeResistor1(unsigned char data)
//{
// tmp=0xff;
// csSamp=1;
// csLevel=1;
// csResistor1=0;
// tmp=data;
// tmp=tmp>>2;
// spi(tmp);
// csResistor1=1;
//csResistor1=0;
// tmp=data;
// tmp=tmp<<6;
// spi(tmp);
// csResistor1=1;
//}
//void send_data1(unsigned char data)
//{ char i;
// PORTB.5=0;// sdi
// PORTB.4=1;//CS0=1
// PORTB.7=0;
// PORTB.4=0;//CS0=1
// delay_ms(1);
// PORTB.7=0;PORTB.5=0;delay_us(10); PORTB.7=1; PORTB.7=0;PORTB.5=0;delay_us(10);PORTB.7=1; //clk
// for(i=7;i;i--)
// {
// PORTB.7=0;
// PORTB.5=0;// sdi
// delay_us(10);
// if(1<<i)PORTB.5=1;// sdi
// PORTB.7=1;
// }
// PORTB.5=0;// sdi
// PORTB.7=0;
// PORTB.4=1;//CS0=1
// delay_ms(1);
//}
//void send_data(int data)
//{
// PORTB.5=0;// sdi
// PORTB.4=0;//CS0=1
// PORTB.7=0; PORTB.7=1; PORTB.7=0;PORTB.7=1; //clk
// spi(data);
// PORTB.7=0;
// PORTB.4=1;//CS0=1
//}
void ShiftData(unsigned char Data1,unsigned char Data2,char sheft1ON,char sheft2ON)
{
unsigned char i,Data;
Data=(Data1)|(Data2<<4);
Data= Data|0x88;
if(sheft1ON==1) Data= Data&0xf7;
if(sheft2ON==1) Data= Data&0x7f;
OUTEN=0;
STROBE = 0;
DISPCLK = 0;
DISPDATA = 0;
for(i = 0;i < 8;i++)
{
if(Data & 0x80)
DISPDATA = 1;
else
DISPDATA = 0;
DISPCLK = 1;
delay_us(4);
DISPCLK = 0;
Data = Data << 1;
}
STROBE = 1;
delay_us(4);
STROBE = 0;
OUTEN=1;
}
void main(void)
{
unsigned int max=0,volt=10;
char ii=0,iii=0;
// Input/Output Ports initialization
// Port A initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=Out Bit3=Out Bit2=Out Bit1=In Bit0=In
DDRA=(1<<DDA7) | (1<<DDA6) | (1<<DDA5) | (1<<DDA4) | (1<<DDA3) | (1<<DDA2) | (0<<DDA1) | (1<<DDA0);
// State: Bit7=0 Bit6=0 Bit5=0 Bit4=0 Bit3=0 Bit2=0 Bit1=T Bit0=T
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (1<<PORTA1) | (1<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(1<<DDB7) | (0<<DDB6) | (1<<DDB5) | (1<<DDB4) | (1<<DDB3) | (0<<DDB2) | (1<<DDB1) | (1<<DDB0);
// State: Bit7=P Bit6=P Bit5=P Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(1<<PORTB7) | (1<<PORTB6) | (1<<PORTB5) | (1<<PORTB4) | (1<<PORTB3) | (1<<PORTB2) | (1<<PORTB1) | (1<<PORTB0);
// Port C initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=Out Bit3=Out Bit2=Out Bit1=Out Bit0=Out
DDRC=(1<<DDC7) | (1<<DDC6) | (1<<DDC5) | (1<<DDC4) | (1<<DDC3) | (1<<DDC2) | (0<<DDC1) | (1<<DDC0);
// State: Bit7=0 Bit6=0 Bit5=0 Bit4=0 Bit3=0 Bit2=0 Bit1=0 Bit0=0
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (1<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (1<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRD=(1<<DDD7) | (1<<DDD6) | (1<<DDD5) | (1<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (1<<PORTD3) | (1<<PORTD2) | (1<<PORTD1) | (1<<PORTD0);
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 2000.000 kHz
// Mode: CTC top=OCR1A
// OC1A output: Disconnected
// OC1B output: Disconnected
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer Period: 0.5 us
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: On
// Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (1<<WGM12) | (0<<CS12) | (1<<CS11) | (0<<CS10);
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0<<AS2;
TCCR2=(0<<PWM2) | (0<<COM21) | (0<<COM20) | (0<<CTC2) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00;
OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (1<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
// External Interrupt(s) initialization
// INT0: On
// INT0 Mode: Falling Edge
// INT1: Off
// INT2: On
// INT2 Mode: Falling Edge
GICR|=(0<<INT1) | (1<<INT0) | (1<<INT2);
MCUCR=(0<<ISC11) | (0<<ISC10) | (1<<ISC01) | (0<<ISC00);
MCUCSR=(0<<ISC2);
GIFR=(0<<INTF1) | (1<<INTF0) | (1<<INTF2);
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: On
// INT2 Mode: Falling Edge
GICR|=(0<<INT1) | (0<<INT0) | (1<<INT2);
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00);
MCUCSR=(0<<ISC2);
GIFR=(0<<INTF1) | (0<<INTF0) | (1<<INTF2);
// USART initialization
// USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) | (0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization
// Analog Comparator: Off
// The Analog Comparator's positive input is
// connected to the AIN0 pin
// The Analog Comparator's negative input is
// connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
// ADC initialization
// ADC disabled
ADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
// SPI initialization
// SPI Type: Master
// SPI Clock Rate: 2000.000 kHz
// SPI Clock Phase: Cycle Start
// SPI Clock Polarity: Low
// SPI Data Order: MSB First
SPCR=(0<<SPIE) | (1<<SPE) | (0<<DORD) | (1<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
SPSR=(0<<SPI2X);
// TWI initialization
// Mode: TWI Master
// Bit Rate: 100 kHz
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);
lcd_init(20);
// Bit-Banged I2C Bus initialization
// I2C Port: PORTD
// I2C SDA bit: 5
// I2C SCL bit: 6
// Bit Rate: 100 kHz
// Note: I2C settings are specified in the
// Project|Configure|C Compiler|Libraries|I2C menu.
i2c_init();
SOUND=1;
//////lcd initial//////////////////////////////
lcd_gotoxy(0,0);lcd_putsf("_FRQ100 Coil:110X110");
lcd_gotoxy(0,1);lcd_putsf("METAL");lcd_gotoxy(11,1);lcd_putsf("LEVEL");
lcd_gotoxy(0,3);lcd_putsf(")))))))))))");
//////////////////////////////////////////////
ShiftData(0,0,1,0) ;
#asm("sei")
//writeResistor(0xff);
//writeResistor(50);
//for(ii=0;ii<255;ii++){ShiftData(ii) ; delay_ms(100);}
while (1)
{
ShiftData(ii,ii,1,0) ;
delay_ms(10);
ii++;
if(ii==8)ii=0;
ltoa(sampAdc,str);
lcd_gotoxy(5,1);
lcd_putsf(" ");
lcd_gotoxy(5,1);
lcd_puts(str);
ltoa(levelAdc,str);
lcd_gotoxy(16,1);
lcd_putsf(" ");
lcd_gotoxy(16,1);
lcd_puts(str);
delay_ms(50);
// ShiftData(7,ii,1,1) ;
//...........................................
// if(!GB)
// { #asm("sei")
// max=0;iii=0;writeResistor(150);
// lcd_clear();
// for(delay=40;delay<160;delay++)
// {
// // delay_ms(12);
// for(power=40;power<160;power++)
// {
// // delay_ms(12);
// if((unsigned int)lastAdc>max)
// {
// max=lastAdc;
// actPower=power;
// actDelay=delay;
// }
// itoa(max,str);
// lcd_gotoxy(0,1);
// lcd_puts(str);
// }
// if(++ii==8){lcd_gotoxy(iii,0);lcd_putchar('>');iii++;ii=0;}
// }
// power=actPower;
// delay=actDelay;
// while(((4096-(unsigned int)lastAdc)<400)||((4096-(unsigned int)lastAdc)>600))
// {
// if((4096-(unsigned int)lastAdc)<400)
// {
// #asm("cli")
// if(--volt<10)volt=10;
// writeResistor(volt);
// ltoa(lastAdc,str);
// lcd_gotoxy(6,1);
// lcd_putsf(" ");
// lcd_gotoxy(6,1);
// lcd_puts(str);
// #asm("sei")
// delay_ms(12);
// }
// if((4096-(unsigned int)lastAdc)>600)
// {
// #asm("cli")
// if(++volt>200)volt=200;
// writeResistor(volt);
// ltoa(lastAdc,str);
// lcd_gotoxy(6,1);
// lcd_putsf(" ");
// lcd_gotoxy(6,1);
// lcd_puts(str);
// #asm("sei")
// delay_ms(12);
// }
// }
// }
if(!FREQ)
{
if(++index==4)index=0;
switch(index)
{
case 0:
FreqVal=10000;
lcd_gotoxy(0,0);
lcd_putsf("_FRQ100 Coil:110X110");
break;
case 1:
FreqVal=8333;
lcd_gotoxy(0,0);
lcd_putsf("_FRQ120 Coil:110X110");
break;
case 2:
FreqVal=5882;
lcd_gotoxy(0,0);
lcd_putsf("_FRQ170 Coil:110X110");
break;
case 3:
FreqVal=1818;
lcd_gotoxy(0,0);
lcd_putsf("_FRQ550 Coil:45X45 ");
break;
}
while(!FREQ);
}
}
}
3- made simulations,edited the program and made sure it was correct
4- I drew a PCB
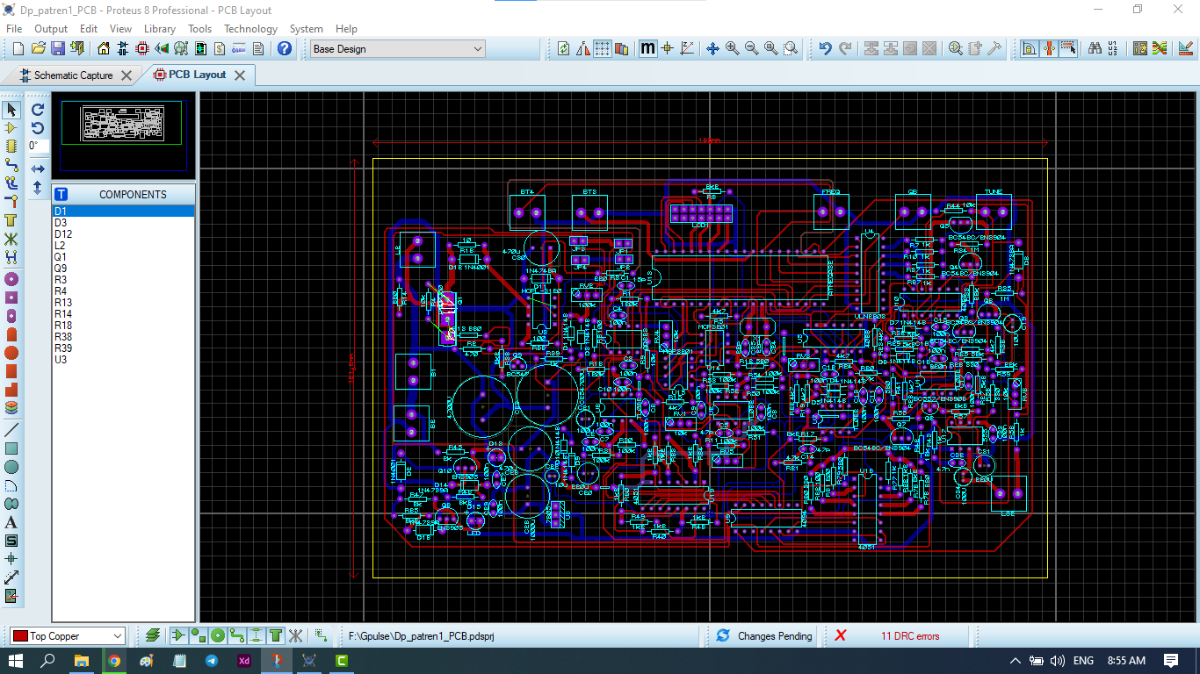
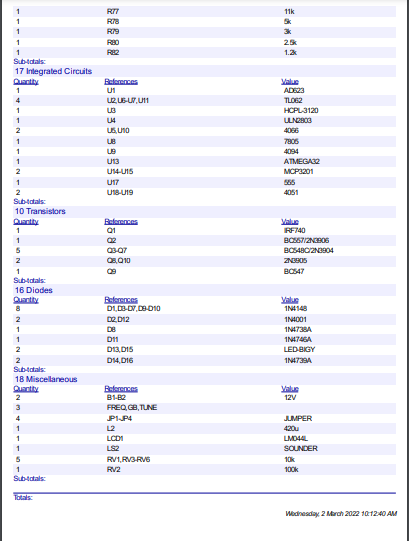
5- I installed the electronic components
.png)
6- I finshed ...