(0).jpg)
Humanoid robot is a walking robot which walks just like a human being and also has good dexterity when it comes to doing various hand movements.
This Humanoid Robot is controlled by ARDUINO UNO R3 BASED USB 18 SERVO CONTROLLER. The software helps to develop the complex sequences in real time on the hardware. It also generates Arduino based code for the developed sequence which can be deployed on the controller on board thereby making the robot autonomous.
So lets start step by step to make this humanoid robot:
Step 1 : As Shown in Image below take 2 x Robot Feets, 2 x Multipurpose Brackets, 8 x Lock Nuts and 8 x
CSK Screws.
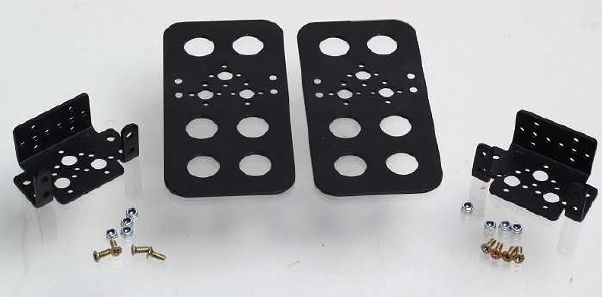
Step 2 : Fix the Short U Brackets on the Multipurpose Brackets as shown in following image :

Step 3 : Now take 2 x Servo Motors, 8 x M4 Screws and 8 x M4 Nuts as shown below.
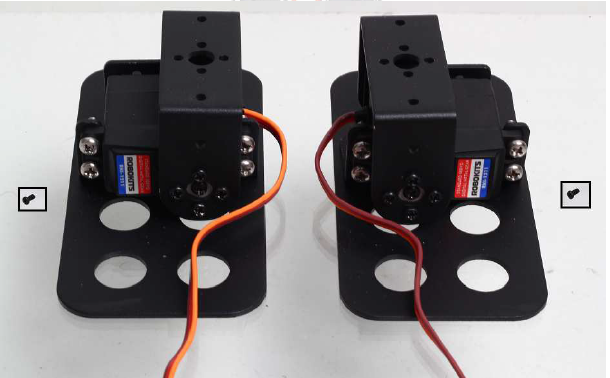
Fix the Servo Motors in the assembly as shown below with the help of M4 Mid Screws and M4 Nuts. Now
the Black Box in the below image shows the Servo Screw which is to be fixed to Servo Motor Shaft after
Neutralizing the Servo Motor. To Neutralize connect the Servo Motor to Servo Controller. Power up Servo
Controller with 5 to 6 VDC power supply and connect to PC software with USB or Bluetooth connection.
Neutralize the servo (Put the servo to center position) using software. After that tight the Servo Screw
(Shown in Black Box) to the Shaft of the Servo Motor as shown in the below image.
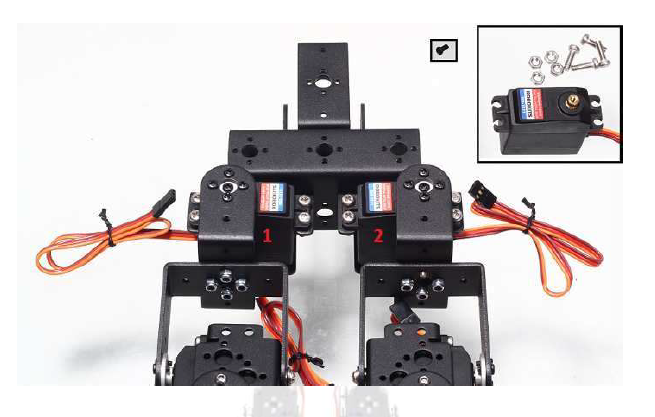
Step 4 : Now we will fix the upper part of the legs as shown below:

Step 5 : Now take 2 x Servo Motors, 8 x M4 Screws, 8 x M4 Nuts and 2 x Servo Screws. The Servo
Motors are to be fixed at place 1 and 2 shown in the below image.
The Servo Screws is to be fixed at the shaft of both Servo Motors after neutralizing the Servo Motors.
Step 6 : Now its time to fix the two arms and the head:
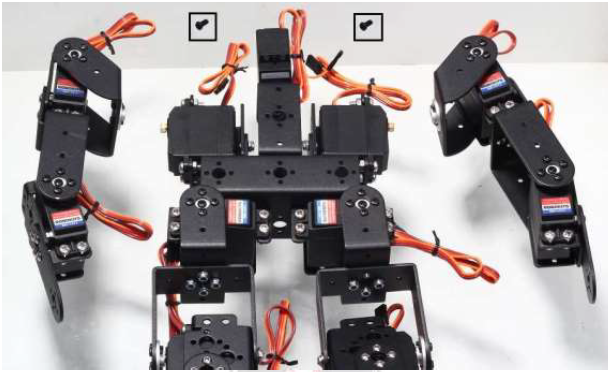
And we are ready:
Following are videos of the humanoid robot doing various actions/ dance moves/yoga/acrobatics: