(0).jpg)
Step 1: The first step is to weld the ESCs to the PCB board which we get with the F 450 drone frame.

Step 2 : After all the four ESCs were welded on to the frame, then assembly of the frame is done using the screws received with the F450 frame.
Assembled frame looks like this:

Step 3 : Pixhawk was installed and wiring done.
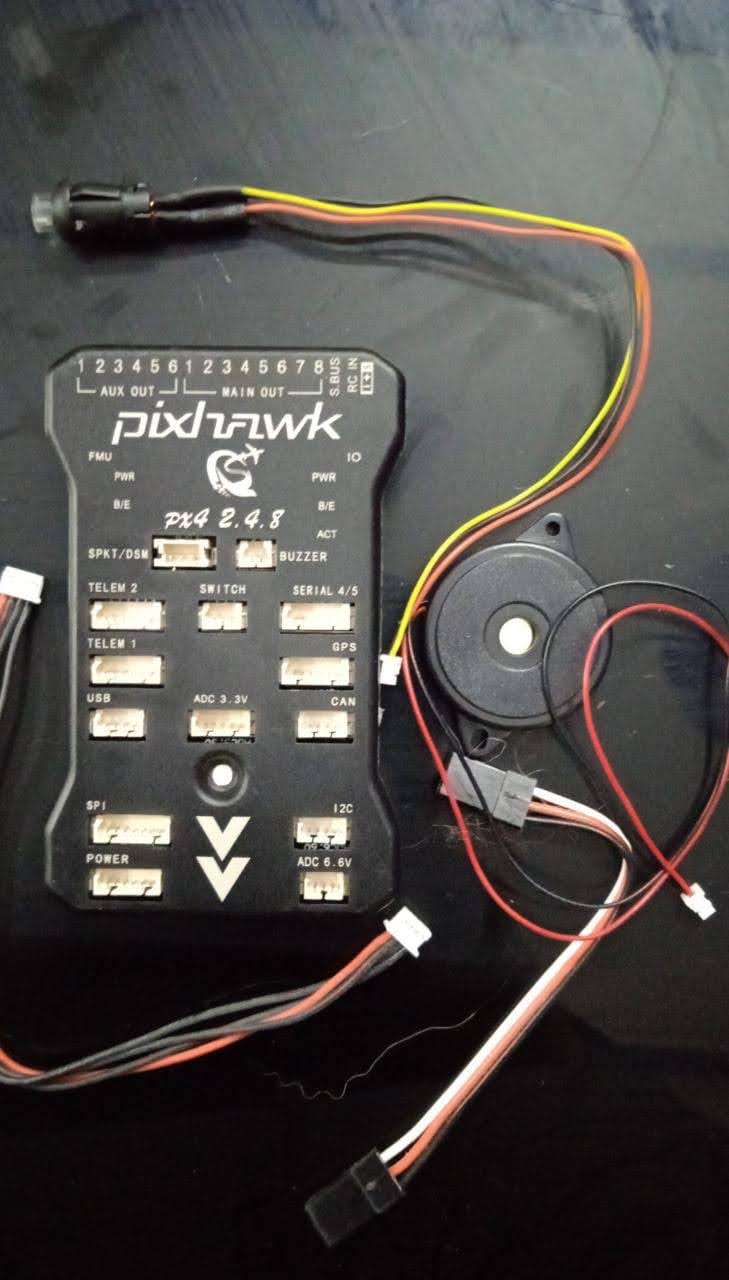
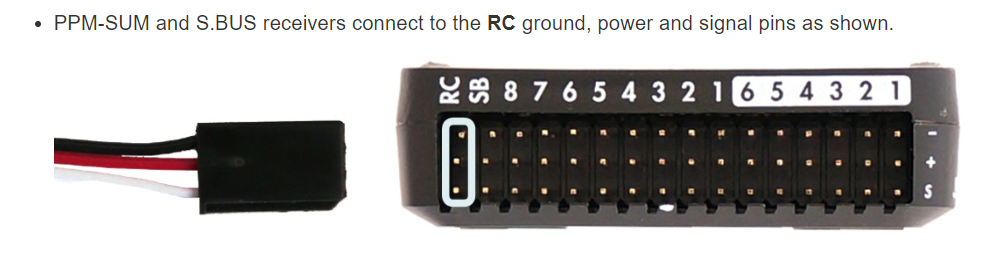
Step 4 : Following pin out was used to do the wiring.
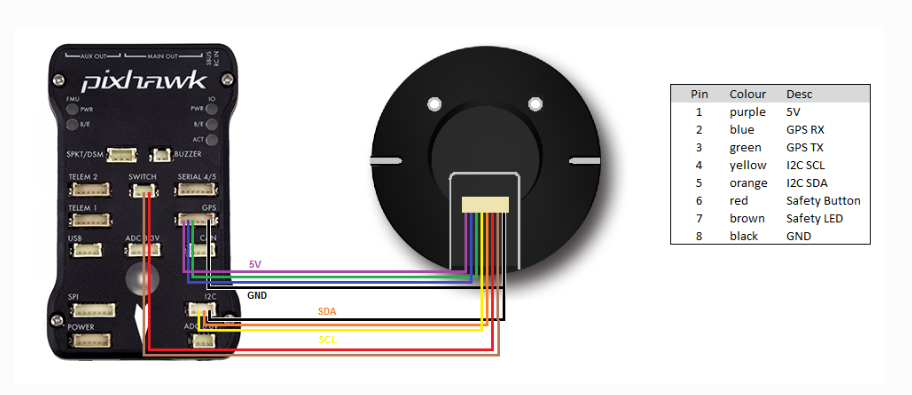
Step 5: Following pin out was used for GPS Connection:
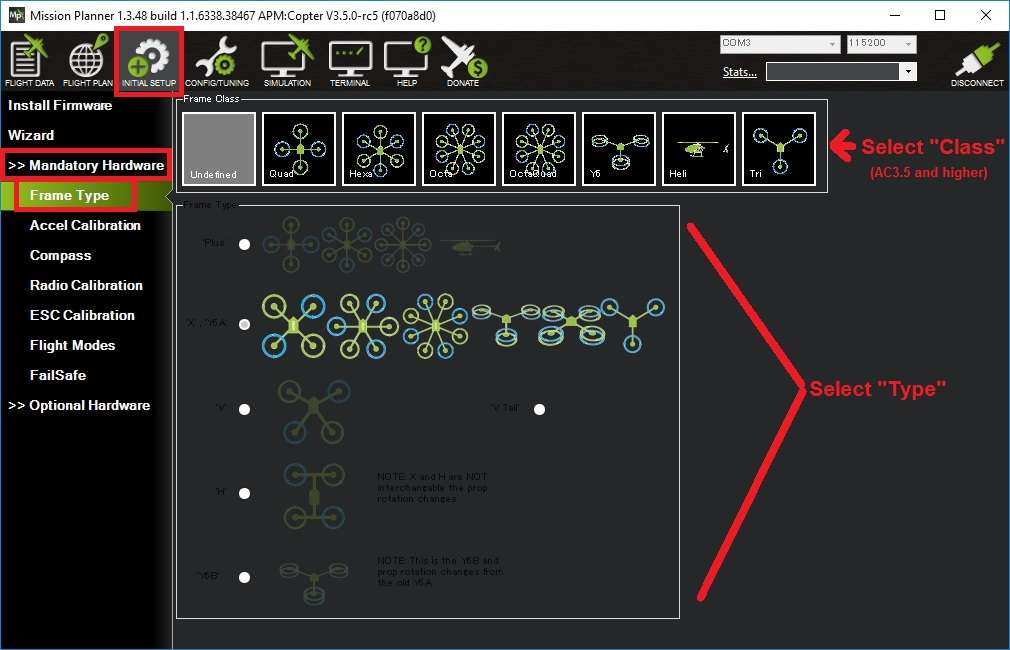
Step 6: Programming of Pixhawk in Ardupilot: Mission planner software is used for doing the programming.
A) First step is the selection of the hardware/ drone type.
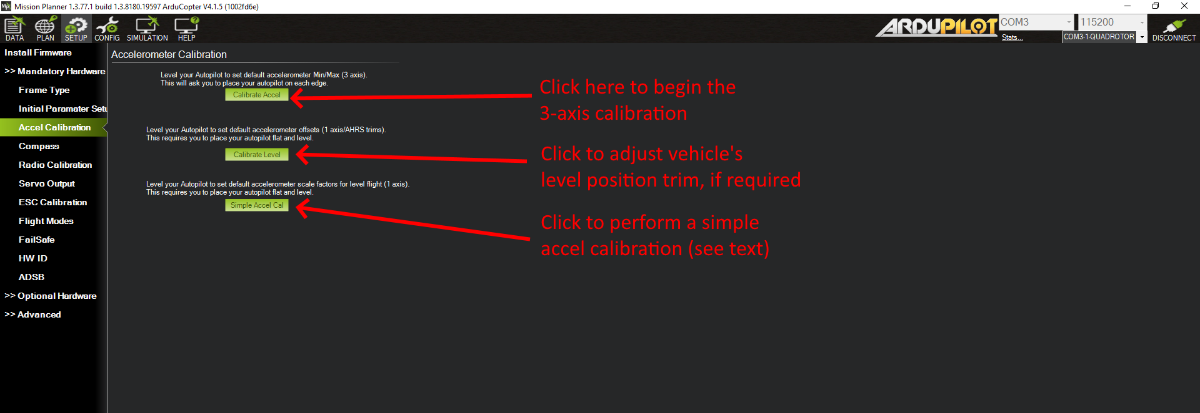
B) Next step after selection of drone type is to do the mandatory setup which includes Accelerometer calibration.
Mission Planner will prompt you to place the vehicle on each axis during the calibration. Press any key to indicate that the autopilot is in position and then proceed to the next orientation.
The calibration positions are: level, right side, left side, nose down, nose up, and on its back.
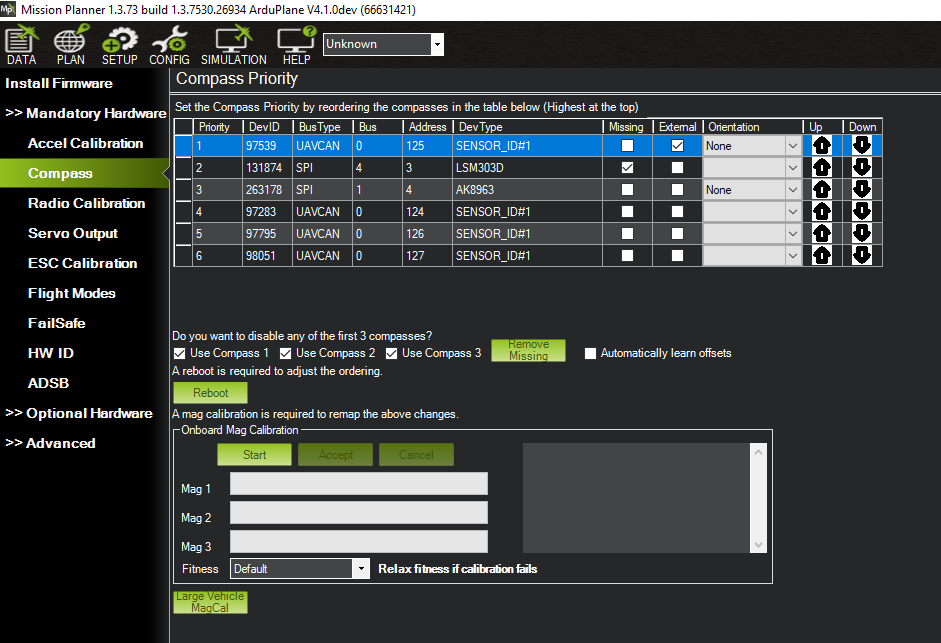
C) After Accelerometer calibration we move on to the Compass calibration:
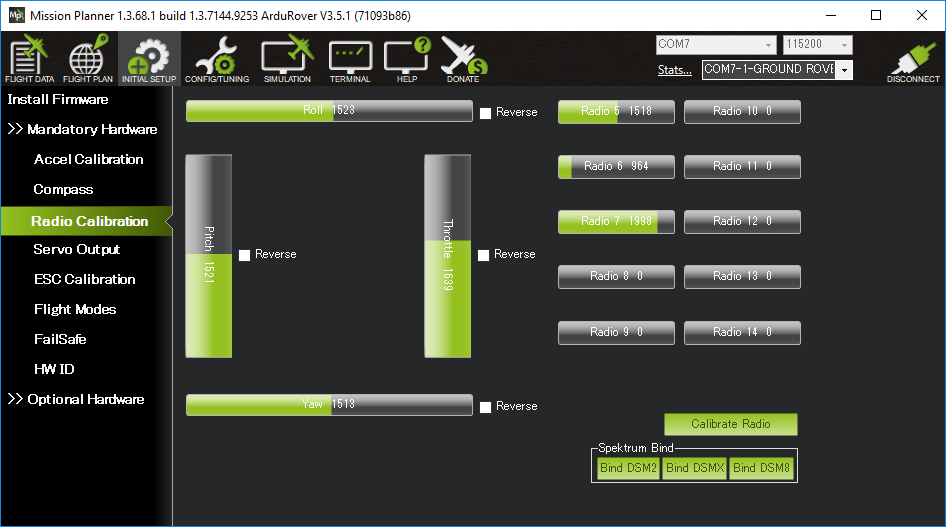
D)After the compass calibration is done successfully we move on to the Radio Calibration:
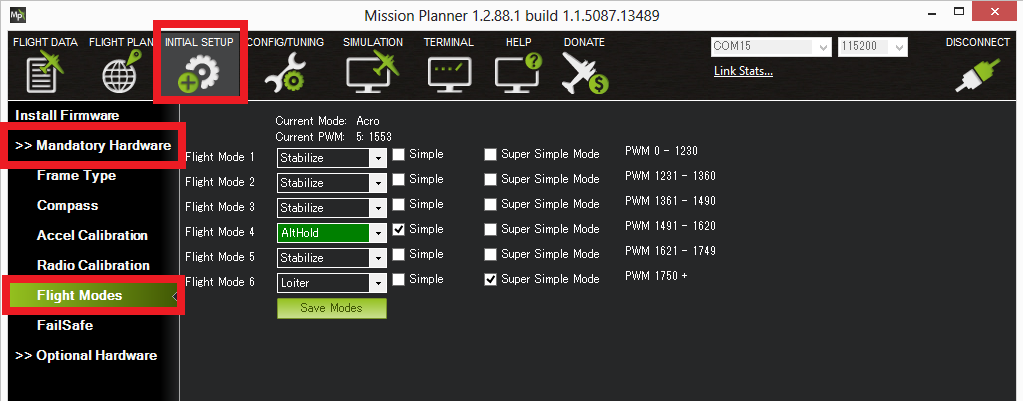
E) After the radio calibration we do the final setup i.e. Flight modes setup:
Step 7: Ready to fly:
Extra features added:
- Return to Land: In case the drone gets disconnected from the transmitter/ remote. It can also be used in case of battery level going below the set level.
- GPS lock for better stability of the drone during the windy condition.
- Altitude hold for fixing the height of drone during flight.
Hip Hip Hurray!!!!!!!! Here we go.....
