
1. INTRODUCTION
Today, India is one of the developing countries in the world. The country’s defence plays an important role in uplifting the nations growth and strengthening the defence system is most important to protect the country and the people. Our project aims to add an additional feature to defence mechanism which helps to fight against terrorism and antisocial activities.
Defence Rover is a military based application robot that can used in critical conditions such as surgical strikes, secret sting operations, anti-violence, anti-terrorism and during natural disasters. It is a man operated system. In this project we have used Arduino, ESP8266 module, GSM module, APM 2.8 as micro controller and also different sensors. This model works based on IOT. This research work proposed to have a prototype model of a bomb/land-mine detection robot (LDR), which can be operated remotely using Wi-fi technology. The safety of humans was addressed and designed robot with special range sensors employed to avoid obstacles. Fabrication of this project prototype was done using lightweight temperature resistant metal. A Global Positioning System (GPS) sensor is employed, which identifies and broadcasts the present location of the robot. Android applications combined with WIFI technology are an inseparable pair at this time especially for controlling a robot. A sophisticated military robot is a robot that is needed by the military/police because it can be deployed to the battlefield or the eradication of terrorism that can be controlled remotely. This system is needed to reduce the remaining casualties from the army, and this combat robot system can also be operated at any time with more numbers than regular soldiers and with minimal operator needs. The robot system is embedded with metal detector capable of sensing a bomb or landmine and cutter diffuses wires also buzzer producing a warning alarm to the nearby personnel in that area. The locomotion of the robot is carried out by the DC motors. The rover detects harmful gases & smoke using MQ2 gas sensor and sends an SMS alert to soldiers. It has a 360-degree rotatable robotic arm and automatic holder used to collect evidence/materials as a source of proof for investigation. It has an inbuilt camera to monitor the operations and crowds during survey. The rover provides network in the form of wi-fi for effective communication and data transfer when the signal is lost in deep forests and hill stations. It can even act as anti-drone mechanism and drop the smoke shells in order to scatter the crowds during strikes and violence. The rover gives a helpful hand during natural disasters like earthquakes, flood, forest fire etc. by providing network for communication, providing food & medicine, life jackets and to combat fire using fire balls, blowing foam substance.
The striking feature of this rover is that it is able to fly in air as a drone and also travel in water. As a result, it can travel in 3 modes of transportation. This feature is more helpful during military operations especially in forest areas and hill stations.
2. PROJECT BUILDING
STEP 1
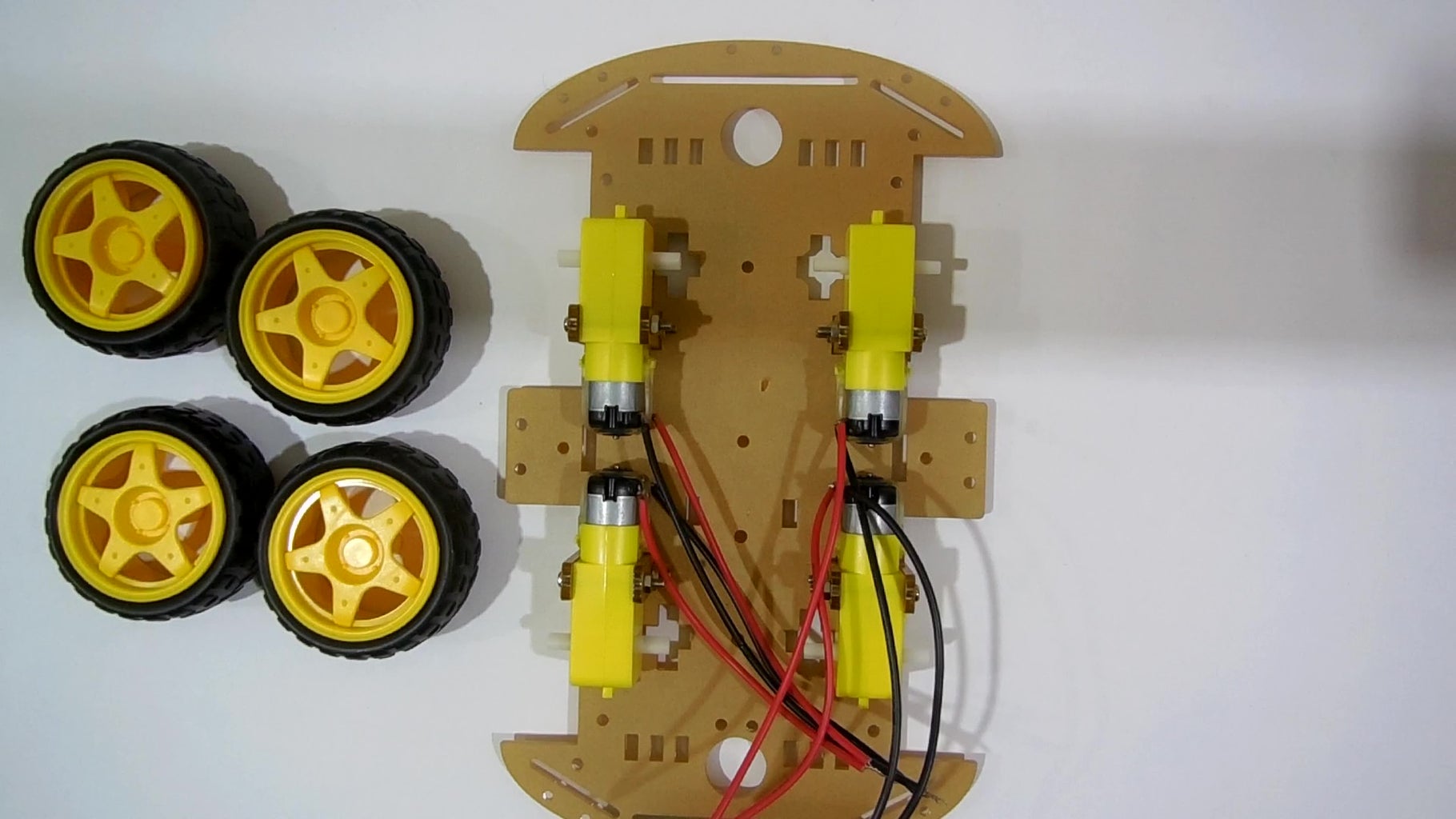
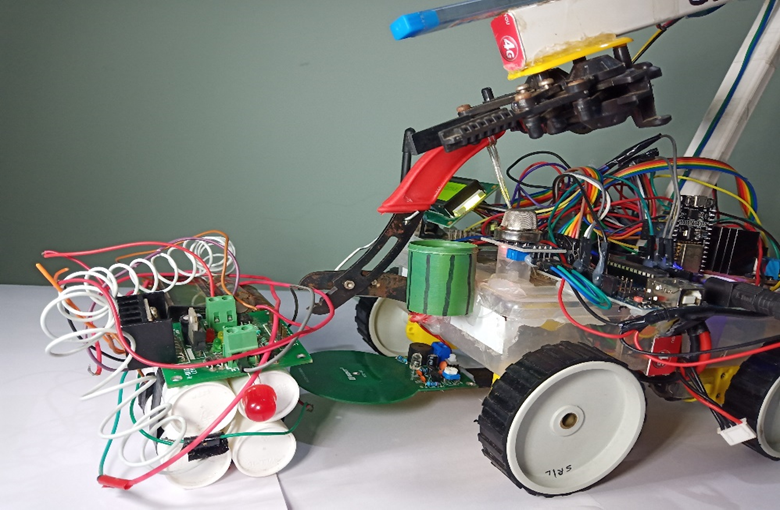
- Choose a right chassis required for the project, mount four BO motors to the chassis and attach wheels to the motors as shown in figure 1.
- Also you can attach belt drives instead of wheels to the rover as per your needs.
STEP 2
- Short the polarities of two motors of each side and then connect it to the motor driver, give power supply of 9-12V to the driver.
- Here I had used 3 celled Lipo battery as a power unit.
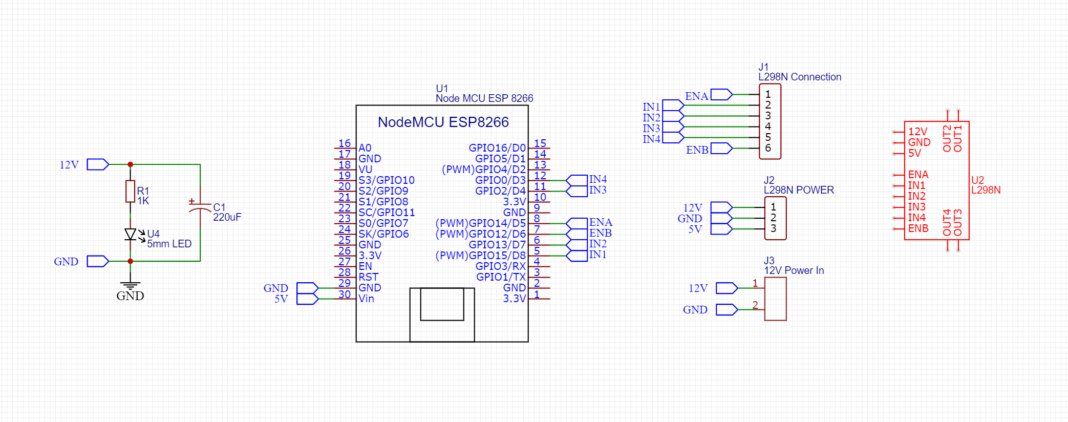
- Then connect IN1, IN2, IN3, IN4 of driver to 8,7,4,3 of node mcu and ENABLE A & B to 5,6 of mcu as shown in figure 2.
- You can use 5V output of driver to power up node mcu.
- The pin diagram is shown below, the code is given in code block section.
STEP 3
- Upload the given code to node mcu using Arduino software.
#define ENA 14 // Enable/speed motors Right GPIO14(D5)
#define ENB 12 // Enable/speed motors Left GPIO12(D6)
#define IN_1 15 // L298N in1 motors Rightx GPIO15(D8)
#define IN_2 13 // L298N in2 motors Right GPIO13(D7)
#define IN_3 2 // L298N in3 motors Left GPIO2(D4)
#define IN_4 0 // L298N in4 motors Left GPIO0(D3)
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
String command; //String to store app command state.
int speedCar = 800; // 400 - 1023.
int speed_Coeff = 3;
const char* ssid = "Make DIY";
ESP8266WebServer server(80);
void setup() {
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
Serial.begin(115200);
// Connecting WiFi
WiFi.mode(WIFI_AP);
WiFi.softAP(ssid);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
// Starting WEB-server
server.on ( "/", HTTP_handleRoot );
server.onNotFound ( HTTP_handleRoot );
server.begin();
}
void goAhead(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goBack(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goRight(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goLeft(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goAheadRight(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar/speed_Coeff);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goAheadLeft(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar/speed_Coeff);
}
void goBackRight(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar/speed_Coeff);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goBackLeft(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar/speed_Coeff);
}
void stopRobot(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void loop() {
server.handleClient();
command = server.arg("State");
if (command == "F") goAhead();
else if (command == "B") goBack();
else if (command == "L") goLeft();
else if (command == "R") goRight();
else if (command == "I") goAheadRight();
else if (command == "G") goAheadLeft();
else if (command == "J") goBackRight();
else if (command == "H") goBackLeft();
else if (command == "0") speedCar = 400;
else if (command == "1") speedCar = 470;
else if (command == "2") speedCar = 540;
else if (command == "3") speedCar = 610;
else if (command == "4") speedCar = 680;
else if (command == "5") speedCar = 750;
else if (command == "6") speedCar = 820;
else if (command == "7") speedCar = 890;
else if (command == "8") speedCar = 960;
else if (command == "9") speedCar = 1023;
else if (command == "S") stopRobot();
}
void HTTP_handleRoot(void) {
if( server.hasArg("State") ){
Serial.println(server.arg("State"));
}
server.send ( 200, "text/html", "" );
delay(1);
}STEP 4
- Download ESP8266 WiFi Robot Car app form play store in your mobile.
- Connect the rover to mobile using Wi-Fi to control the movements.
STEP 5
- Attach metal detector with a buzzer to front end of the chassis and above that place a cutter to diffuse the wires
- The distance of the detector from the ground level depends on it's sensitivity range.
- The cutter action is controlled using a dc motor which is connected to the node mcu as same as the above mentioned.
- Power supply is given to metal detector from 5V output of driver and dc motor is powered by battery.
STEP 6
- Now take Arduino, GSM module and MQ2 gas sensor.
- Make the circuit connection as shown in figure 3.
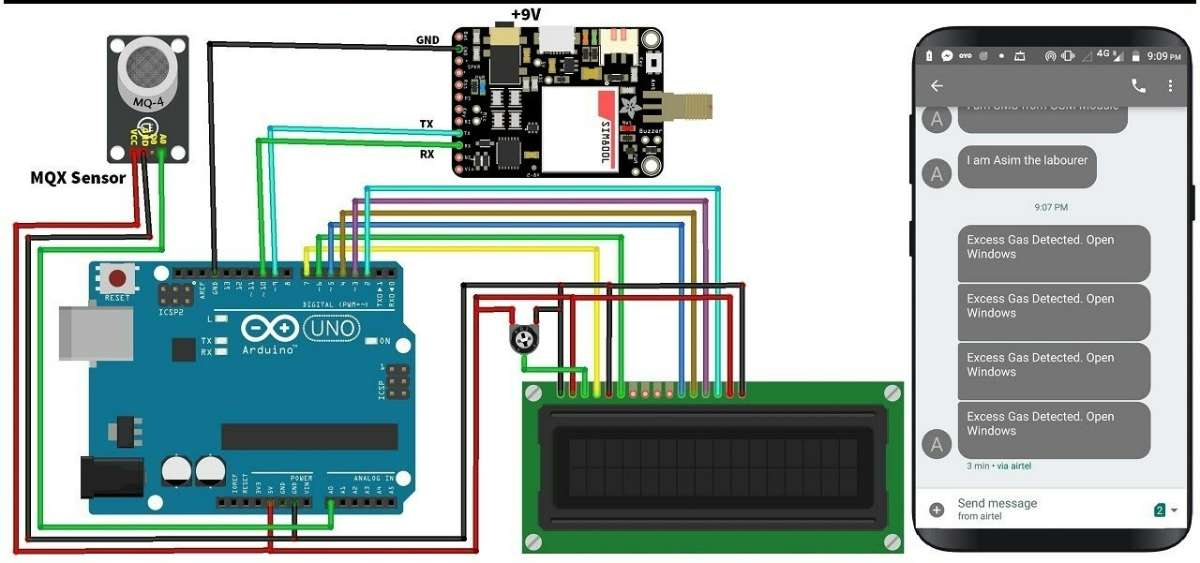
- Give the power supply from battery to power jack of Arduino.
- Now mount all the components on the chassis properly and upload the given code to Arduino.
- You can use gas lighter or smoke to test and get the result.
#include <LiquidCrystal.h>
LiquidCrystal lcd(7, 6, 5, 4, 3, 2);
#include <SoftwareSerial.h>
SoftwareSerial mySerial(9, 10);
int gasValue = A0; // smoke / gas sensor connected with analog pin A1 of the arduino / mega.
int data = 0;
void setup()
{
randomSeed(analogRead(0));
mySerial.begin(9600); // Setting the baud rate of GSM Module
Serial.begin(9600); // Setting the baud rate of Serial Monitor (Arduino)
lcd.begin(16,2);
pinMode(gasValue, INPUT);
lcd.print (" Gas Leakage ");
lcd.setCursor(0,1);
lcd.print (" Detector Alarm ");
delay(3000);
lcd.clear();
}
void loop()
{
data = analogRead(gasValue);
Serial.print("Gas Level: ");
Serial.println(data);
lcd.print ("Gas Scan is ON");
lcd.setCursor(0,1);
lcd.print("Gas Level: ");
lcd.print(data);
delay(1000);
if ( data > 500) //
{
SendMessage();
Serial.print("Gas detect alarm");
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Gas Level Exceed");
lcd.setCursor(0,1);
lcd.print("SMS Sent");
delay(1000);
}
else
{
Serial.print("Gas Level Low");
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Gas Level Normal");
delay(1000);
}
lcd.clear();
}
void SendMessage()
{
Serial.println("I am in send");
mySerial.println("AT+CMGF=1"); //Sets the GSM Module in Text Mode
delay(1000); // Delay of 1000 milli seconds or 1 second
mySerial.println("AT+CMGS=\"+91900xxxxxxx\"\r"); // Replace x with mobile number
delay(1000);
mySerial.println("Excess Gas Detected. Open Windows");// The SMS text you want to send
delay(100);
mySerial.println((char)26);// ASCII code of CTRL+Z
delay(1000);
}STEP 7
- You can make robotic arm yourself by using PVC casing pipes that is used to enclose electric wires.
- Cut two pieces of pipes 20cm each and attach BO motor as shown in figure 4.
- Attach electric picker or holder at one end of the pipe as shown in figure 5.
- Make the connections using node mcu and motor driver as done in step 2.
- The controlling of the arm and holder is done using android phone connected to Wi-Fi.
.jpg)
.jpg)
STEP 8
- For monitoring the surrounding environment I had used phone camera which acts as transmitter and will be connected to another android phone that acts as receiver or a display unit.
- For this you need to install AtHome Video Steamer application from play store in both the phones.
- Mount the phone at front part of the chassis to get better coverage.
3. DEMONSTRATION VIDEO
4. BRIEF DESCRIPTION
1. INTRODUCTION
Nowadays, with the development of technology, several robots with very special integrated systems are particularly employed for such risky jobs to do the work diligently and precisely. The development of intelligent robots for military purposes increasing every year. The U.S. military inventory now comprises more than 12,000 ground robots and 7,000 UAVs. In addition to the United States, 44 other countries are now pursuing unmanned military systems. It’s not that the human role is disappearing from war. War remains a human endeavor, driven by our flaws and reflecting our best and worst traits.
A land mine is an explosive device concealed under or on the ground and designed to destroy the or disable enemy targets, ranging from combatants to vehicles and tanks, as they pass over or near it. Such a device is typically detonated automatically by way of pressure when a target steps on it or drives over it, although other detonation mechanisms are used. A land mine may cause damage by direct blast effect, by fragments that are thrown by the blast, or by both. The name originates from the ancient practice of military mining, where tunnels were dug under enemy fortifications or troop formations. These killing tunnels were first collapsed to destroy the targets located above, but they were later filled with explosives and detonated in order to cause even greater devastation. Nowadays, in common parlance, land mines generally refer to devices specifically manufactured as anti-personnel or anti-vehicle weapons. Though many types of improvised explosive devices ("IEDs") can technically be classified as land mines, the term land mine is typically reserved for manufactured devices designed to be used by recognized military services, whereas IED is used for makeshift devices assembled by paramilitary, insurgent or terrorist groups.
Defence Rover is a military based application robot. It is used in critical conditions such as surgical strikes, secret sting operations, antiviolence, antiterrorism and in natural disasters. This rover intends to enhance a soldier’s existing capabilities while keeping them out of harm’s way as much as possible. Defence rover contribute to military superiority by giving troops an advantage at the ground level. Militaries as a whole gain a tactical advantage through the use of defence rover.
Need of defence rover
- To save the life of Soldiers as well the people.
- To secure the Nation.
- To achieve peace.
- To fight against terrorism and antisocial activities.
- To strengthen the countries Defence system.
- To save people of our nation during natural calamities.
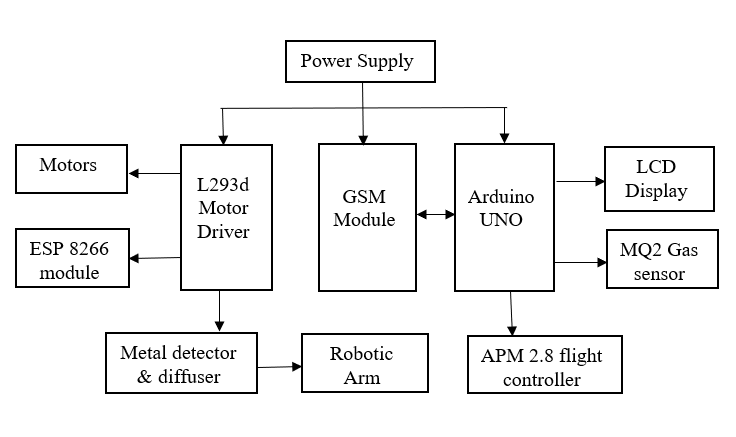
2. PROPOSED METHOD ARCHITECTURE
The rover has developed mainly by 3 microcontrollers namely, ARDUINO UNO, ESP 8266, APM 2.8 Flight controller and motor drivers as shown in figure 1. The power supply is given to these microcontrollers and drivers using voltage divider module. I/O pins of the drivers are connected to the microcontrollers. The power supply is given to these microcontrollers and drivers using voltage divider module. I/O pins of the drivers are connected to the microcontrollers. Geared motors are connected to the node mcu and brushless motors are connected to esc’s and from esc’s to amp 2.8 flight controller. LCD display & MQ2 gas sensor, metal detector is connected to Arduino. Robotic arm and diffuser are connected to driver.
This research work proposed to have a prototype model of a bomb/land-mine detection robot (LDR), which can be operated remotely using Wi-fi technology. The safety of humans was addressed and designed robot with special range sensors employed to avoid obstacles. Fabrication of this project prototype was done using lightweight temperature resistant metal. A Global Positioning System (GPS) sensor is employed, which identifies and broadcasts the present location of the robot. Android applications combined with WIFI technology are an inseparable pair at this time especially for controlling a robot. A sophisticated military robot is a robot that is needed by the military/police because it can be deployed to the battlefield or the eradication of terrorism that can be controlled remotely. This system is needed to reduce the remaining casualties from the army and this combat robot system can also be operated at any time with more numbers than regular soldiers and with minimal operator needs.
The robot system is embedded with metal detector capable of sensing a bomb or landmine and cutter diffuses wires also buzzer producing a warning alarm to the nearby personnel in that area. The locomotion of the robot is carried out by the DC motors. The rover detects harmful gases & smoke using MQ2 gas sensor and sends an SMS alert to soldiers. It has a 360-degree rotatable robotic arm and automatic holder used to collect evidence/materials as a source of proof for investigation. It has an inbuilt camera to monitor the operations and crowds during survey. The rover provides network in the form of wi-fi for effective communication and data transfer when the signal is lost in deep forests and hill stations. It can even act as anti-drone mechanism and drop the smoke shells in order to scatter the crowds during strikes and violence. The rover gives a helpful hand during natural disasters like earthquakes, flood, forest fire etc. by providing network for communication, providing food & medicine, life jackets and to combat fire using fire balls, blowing foam substance.
3. ROLE OF DEFENCE ROVER TO FIGHT AGAINST TERRORISM & ANTISOCIAL ACTIVITIES
- Bomb/Land mine Detection and Diffuser
As shown in figure 2, The rover is equipped with bomb and land mine diffusing technology; it consists of a metal detecting sensor to detect the bomb and also a cutter to diffuse the wires. It is more helpful during the surgical strikes, secret sting operations, anti-terrorism and also during wars. It can also be used to diffuse the grenade bombs, by cutting the string connected between two grenades and save the life of soldiers
- Gas/Smoke detection & SMS alert
For this application we are using a MQ2 gas sensor that detects LPG, butane, propane, methane, smoke. Arduino and GSM as microcontrollers and also an LCD display as shown in figure 3.a. The necessary program is uploaded to Arduino and it is connected with a GSM module which is enclosed with a sim card. When the gas exceeds the normal level
GSM activates and an SMS alert will be sent to the operator of rover stating that ‘Harmful and excess gas detected. Be Alert’ as shown in figure 3.b. So, that necessary precautions can be taken in handling the secret military operations. For instance, if the enemy team set up the gas explosives in order to kill the army people, in such situation this application will be more useful. The rover has a gas sensor that detects harmful and poisonous gas and sends an SMS alert as in the above image.
.png)
.png)
- Robotic Arm and holder
As shown in figure 4, The rover has a built-in arm that is rotatable in 360 degree that helps in military operations and automatic holder that picks up reluctance objects and materials as source of evidence. For instance, 1) Finger prints of the enemies or culprits can be collected with the help of these evidences and further investigation can be done. 2)The enemies set up the explosives in the cars and when door is opened bomb get blasted. In such suspicious situation the robotic arm helps in opening the doors of the vehicles.
.png)
- Surveillance
This rover can be equipped with a 360-degree rotatable camera for monitoring the activities and movements of enemy team and to take necessary actions. But in this model, we are using a phone camera to monitor the surrounding environment as shown in figure 5. As we all know that in Kashmir there will be frequent riots, strikes & violence. In such situation we can use this rover to survey and monitor the people’s actions.
.png)
- Wi-Fly
It is a type of application which provides network in the form of Wi-Fi. For that ESP 8266 module is used popularly known as node mcu – it is a self-contained SOC with integrated IP protocol stack that can give access to Wi-Fi network as shown in figure 6. If the military operation undergoes in hilly areas or in deep forests, in such places there will be no network for effective communication between commandos. So, in such situation this rover can fly as a drone and within the range of two kms it can provide the network for the users. This application is also helpful during natural disasters like earthquakes & floods where mobile towers will stop working telecommunication will be affected badly and people experience bad network.
.png)
- 3 modes of transportation
As this rover is able to fly like a drone and travel in water and on land. It covers all 3 modes of transportation. This application is extremely helpful during military operations. For instance, if rover is not able to travel on land areas due to some obstacles it can be operated as a drone to reach the target in time as shown in figure 7. Also, it’s light weight body helps to float on water.
.png)
- Anti-drone mechanism
As we all know that frequent drone attacks will happen at the borders. In order to capture those illegal drones, the rover is equipped with anti-flight controller that unpairs the receiver of drone with transmitter by jamming the radio signals and thereby making it unstable to fly further. Or we can trap the drone by using a net/mesh as shown in figure 8.
.png)
- Anti-Violence
If there are strikes, riots by the public and if it turns to violence then in order to scatter people, we can use the rover to drop some smoke shells in middle of crowds as shown in figure 9.
.png)
4. ROLE OF DEFENCE ROVER TO FIGHT AGAINST NATURAL DISASTERS
- Dropping life jackets
In case of floods where a person is stuck in water or droning in water rover saves them by dropping life jackets as shown in figure 10.
.png)
- Food & Medicine delivery
During emergency situations like wars or floods/earthquakes rover is helpful in delivering food, medicines and other requirements with less time to soldiers and people as shown in figure 11.
.png)
- Advanced Forest Rescuer
Forest fire is one such natural disaster where controlling it is a big deal to humans. In such situation rover helps to prevent fire successfully. Here we are using one of the known chemical experiments called Elephant tooth paste with the rover to protect when the forest is on fire as shown in figure 12. Some of the Real time examples are shown in figure13.a and figure13.b.

- Capability of fire fighter
- Reaches all kind of geographical areas.
- Covers large area in less time.
- Less human interactions.
- Long life battery.
.png)
.png)
5. CONCLUSION
In this paper, we propose a model of a military robot using computer vision that can be controlled remotely using Bluetooth & WIFI technology from Android apps. The ability of computer vision for detecting the upper body as a target is enough good. A military robot is an important tool for combat. Combat robots will rapidly become an inherent part of our fighting forces within the next 10-15 years. Future warfare will involve operators and machines, not soldiers shooting at each other on the battlefield. For future work, we will propose a method for shooting a target with more precise and accurate and using secure communication.
This paper has described overall design for wheeled robot for landmine detection, bomb detection & diffusion, gas/smoke detection and anti-drone mechanism. The wheeled robot is less expensive, robust and it is a helpful tool in for military for surveying and monitoring purpose. The future scope is concentrated on the improvement of the body designs by placing suspension system to over shock from the uneven surfaces. The robot is equipped with a camera for monitoring the condition of the robot. The power system is developed by replacing the battery with the solar panels to produce continuous power. The robot is equipped with a robotic arm for the diffusion purpose. In this project the model of robot can be described to build a robot using night vision wireless camera run by Arduino controller. Controlling of robot can be performed through wireless communication using Wi-Fi and NRF24L01. The function of robot can be enhanced with an electric refile, tranquilizer dart gun and Missile launching system. The gun can be fired remotely by means of remote control using NRF24L01 radio Wi-Fi module. As the terror is always remains India’s first enemy so, the robots are going to use for saving human life. Countries like India are still facing and confronting with regular threats from terrors. Both Kashmir and Mumbai terror attacks have consummated that as far as possible the future of warfare will be handle by robot and unmanned machines to protect human life.
In our Indian army there is no modern combat robot technology. The present robots in Indian army are only capable of doing surveillance during day and night time and are not capable of doing combat operations. Our project is capable of providing surveillance and is also capable of performing combat operations by its Gun and missile systems that can be operated remotely. By using the defence rover as a front-line warrior, we can increase the strength of armed forces and also, we can save our soldiers.
6. FUTURE SCOPE
- If the project is well developed further, an electric rifle (Figure 14.a) and a tranquiller dart gun (Figure 14.c) can be implemented to the rover.
- The main advantage of dart gun is we can catch the culprits alive by shooting the darts which make them unconscious and they can be the source of evidence for further investigation.
- Electric rifle is used shoot enemies in emergency situation.
- By implementing face recognition system using AI, auto shoot is also possible.
.png)
.png)
.png)
- Electric Rifle– Rover is enclosed by a gun that fires when command is passed on a culprit.
- Dart gun – Rover consists of a dart gun that make the suspect or culprit unconscious using tranquilizers. So that further enquiries can be done and take strict actions.
- Efficiency – The model is portable due to small structural design and perform many tasks and functions.
