
This cheetah-like machine is the brainchild of smart robot. It is nothing but the replica of MIT Cheetah and it is currently in development as one of the world’s first independently agile robots. Taking inspiration from the way that cheetahs achieve their speed (this robot’s maximum running speed is nowhere near that of its biological counterpart yet), we hope to create a machine that can act as a first responder in emergency situations to keep human rescuers out of harm’s way.
The robot is meant to be able to run and traverse uneven terrain independently. It can sense hurdles via built-in cameras and jump over them as it runs. Once the robotic cheetah’s agility has been perfected, we are hoping to enable it to perform more intricate tasks such as site inspection, walking through difficult path, etc.
Our initial motivation behind this project is to use Robot as a rescue-bot, “If there are suspicious sites like tunnels, bridges, etc. around you and you need to work there and travel from there, but it’s dangerous to send people in. Now, there is no single robot that can do this kind of job. So, we want to create a robotic first responder that can potentially do more than a human and help in our lives.”
Among the most significant discoveries of our generation is the advancement of technology. In the era of technology, we all strive to make this world a better place. Our constant search for progress inspires us to develop newer technologies. One thing that strikes our mind when we think of our future is robots. Today, robots live among us. Recent technological advancements have brought robotics out of the science fiction novel and into our living rooms. While this might seem frightening to some, robots are here to help. In this project we are going to design the exact copy of MIT’s cheetah robot. It contains some features which will be helpful to explore undiscovered lands, or to get reading about environment of dangerous places where man cannot go. Also, in this project we are going to use IOT, and Mechatronics. So by implanting this Robot in many fields like police, army, fire extinguisher etc. can be very useful.  Robots today help humans solve everyday problems. The robots here are not sentient creatures from sci-fi horror films; they are simple machines designed to perform a set of tasks. The functions may be straightforward - such as waking me up in the morning - or complex - like pouring me a cocktail. Robots in production do easy tasks so that human workers can focus their time and energy on more complex tasks. The introduction of robotics in everyday life marks an exciting time in human history. We have achieved goals that we never dreamt were possible. MIT's Cheetah robots are small quadruped robots capable of running, jumping, walking, and flipping. They're not consumer products, but MIT hopes that the Mini Cheetah's durable and modular design will make it an ideal tool for researchers. A big part of why we built this robot is that it makes it so easy to experiment and just try crazy things, because the robot is super robust and doesn’t break easily, and if it does break, it’s easy and not very expensive to fix.
Robots today help humans solve everyday problems. The robots here are not sentient creatures from sci-fi horror films; they are simple machines designed to perform a set of tasks. The functions may be straightforward - such as waking me up in the morning - or complex - like pouring me a cocktail. Robots in production do easy tasks so that human workers can focus their time and energy on more complex tasks. The introduction of robotics in everyday life marks an exciting time in human history. We have achieved goals that we never dreamt were possible. MIT's Cheetah robots are small quadruped robots capable of running, jumping, walking, and flipping. They're not consumer products, but MIT hopes that the Mini Cheetah's durable and modular design will make it an ideal tool for researchers. A big part of why we built this robot is that it makes it so easy to experiment and just try crazy things, because the robot is super robust and doesn’t break easily, and if it does break, it’s easy and not very expensive to fix. Nowadays, design, development, and motion planning of a mobile robot explore research areas in the field of robotics. Mobile robots have an extensive area of applications in various fields like space exploration, military application, industrial use, and many more. Hence, the design and development of a mobile robot is a crucial part of the above application. Among the entire mobile robot, the quadruped robot is a legged robot, which is superior to wheeled and tracked robot due to its potential to explore in all the terrain like the human and animal. In this paper, the survey concentrates on various design and development approaches for the quadruped robot, and environment perception techniques are discussed. Besides, Spot is one of the most advanced and intelligent quadruped robots. The performance of each quadruped robot and the future outline are provided in details.
Nowadays, design, development, and motion planning of a mobile robot explore research areas in the field of robotics. Mobile robots have an extensive area of applications in various fields like space exploration, military application, industrial use, and many more. Hence, the design and development of a mobile robot is a crucial part of the above application. Among the entire mobile robot, the quadruped robot is a legged robot, which is superior to wheeled and tracked robot due to its potential to explore in all the terrain like the human and animal. In this paper, the survey concentrates on various design and development approaches for the quadruped robot, and environment perception techniques are discussed. Besides, Spot is one of the most advanced and intelligent quadruped robots. The performance of each quadruped robot and the future outline are provided in details.
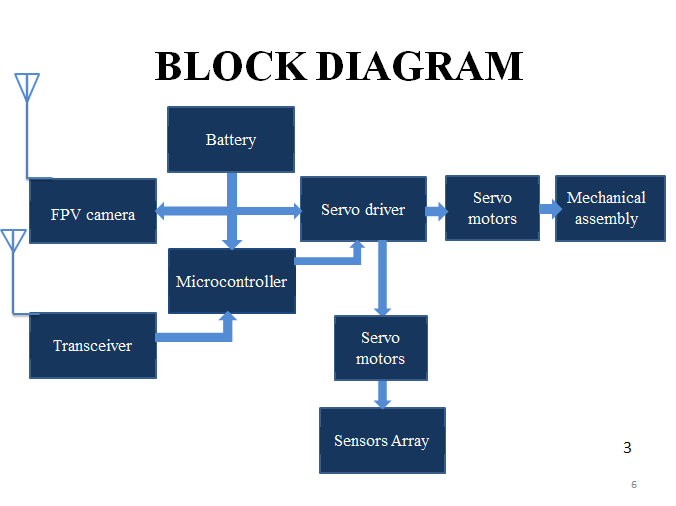 As shown in the block diagram, smart quadrupedal robot consists of Arduino MEGA as a primary microcontroller which will control all the servo motors on the robot. We choose the MEGA as a main microcontroller as it has multiple PWM pinouts ready to use and we require multiple PWM pins for our project as we are controlling various high-torque servo motors at a time. Also, MEGA has high processing clock speed
As shown in the block diagram, smart quadrupedal robot consists of Arduino MEGA as a primary microcontroller which will control all the servo motors on the robot. We choose the MEGA as a main microcontroller as it has multiple PWM pinouts ready to use and we require multiple PWM pins for our project as we are controlling various high-torque servo motors at a time. Also, MEGA has high processing clock speed
ESP-32 camera module as a secondary microcontroller which is programmed to control the direction of the robot and to transmit video through the camera module installed on the microcontroller. These motors are controlled by an operator by using joystick in the software webpage. This communication can be done by installed Wi-Fi module.
Flowchart
.png)
To get body parts of accurate size and measure is crucial in order to get precise angular movements by arms of the robot. Hence, we decided to use 3D printer for framing the body parts and mainframe for our robot. We have used software called Blender for 3D modelling of parts and another software named as Cura for precise modelling of the parts, which we discuss in detail in the software section. Below is the 3D printed objects.
Blender For 3D Modelling of Body Parts:
Blender is the unfastened and open-supply 3-D introduction suite. It helps the whole lot of the 3- D pipeline-modelling, rigging, animation, simulation, rendering, compositing and movement tracking, even video modifying and sport introduction. Advanced customers hire Blender’s API for Python scripting to personalize the software and write specialized tools; frequently those are protected in Blender’s destiny releases. Blender is nicely applicable to people and small studios who gain from its unified pipeline and responsive improvement process. Examples from many Blender-primarily based totally tasks are to be had withinside the showcase. Blender is cross[1]platform and runs similarly nicely on Linux, Windows, and Macintosh computers. Its interface makes use of OpenGL to offer a regular experience. To affirm unique compatibility, the listing of supported systems suggests the ones frequently examined via way of means of the improvement team. As a community-pushed task below the GNU General Public License (GPL), the general public is empowered to make small and big modifications to the code base, which ends up in new features, responsive computer virus fixes, and higher usability. Blender has no charge tag; however, you could invest, participate, and assist to boost an effective collaborative tool: Blender is your very own 3-D software
.jpeg)
.jpeg)

.png) Cura is an open-supply cutting utility for 3-D printers. It became created with the aid of using David Braam who become later hired with the aid of using Ultimaker, a 3-D printer production company, to preserve the software program. Cura is to be had below the LGPLv3 insecure become to begin with launched below the open-supply Affero General Public License model 3, however on 28 September 2017, the license become modified to LGPLv3.This extrude allowed for greater integration with third-celebration CAD applications. Development is hosted on GitHub. Ultimaker Cura is utilized by over 1,000,000 customers international and handles 1.four million print jobs in line with week. It is the favored 3-D printing software program for Ultimaker 3-D printers; however, it could be used with different printers as well. Ultimate Cura works via way of means of cutting the user’s version report into layers and producing a printer-precise g-code. Once finished, the g-code may be dispatched to the printer for the manufacture of the bodily object. The open-supply software, like minded with maximum laptop 3-D printers, can paintings with documents withinside the maximum not unusual place 3- D codecs including STL, OBJ, X3D, 3MF in addition to picture report codecs including BMP, GIF, JPG, and PNG.
Cura is an open-supply cutting utility for 3-D printers. It became created with the aid of using David Braam who become later hired with the aid of using Ultimaker, a 3-D printer production company, to preserve the software program. Cura is to be had below the LGPLv3 insecure become to begin with launched below the open-supply Affero General Public License model 3, however on 28 September 2017, the license become modified to LGPLv3.This extrude allowed for greater integration with third-celebration CAD applications. Development is hosted on GitHub. Ultimaker Cura is utilized by over 1,000,000 customers international and handles 1.four million print jobs in line with week. It is the favored 3-D printing software program for Ultimaker 3-D printers; however, it could be used with different printers as well. Ultimate Cura works via way of means of cutting the user’s version report into layers and producing a printer-precise g-code. Once finished, the g-code may be dispatched to the printer for the manufacture of the bodily object. The open-supply software, like minded with maximum laptop 3-D printers, can paintings with documents withinside the maximum not unusual place 3- D codecs including STL, OBJ, X3D, 3MF in addition to picture report codecs including BMP, GIF, JPG, and PNG..png) Simulation Circuit:
Simulation Circuit:
As shown in above simulation, the unit consist of Arduino MEGA as a main microcontroller and ESP 32 cam module. Power supply of constant DC 4.2V which is considered as Li-Po battery of same voltage. It also consists of Servo 12 motors which operate at 5V. which are connected to analog pins of NANO from PCA22 till PCA33.
.png) 3 GUI (Graphic User Interface) for controlling the movements:
3 GUI (Graphic User Interface) for controlling the movements:
We have designed an interactive graphic user interface for this project using HTML and CSS language. This webpage is basically programmed inside our secondary microcontroller that is ESP 32 with which our smart device can connect through a Wi-Fi. This webpage will be responsible for showing us a live footage from the camera over the microcontroller which can be used as a surveillance purpose. Apart from that we are also able to control the movements of the robot in all direction using the provided joystick which is shown in following figure.
.png)
Webpage GUI