- The battery is used for generating electricity.
- The chosen controller was a wireless-based controller that employed a Wi-Fi-based communication protocol to communicate with the receiver.
- A smartphone is utilized as a remote control.
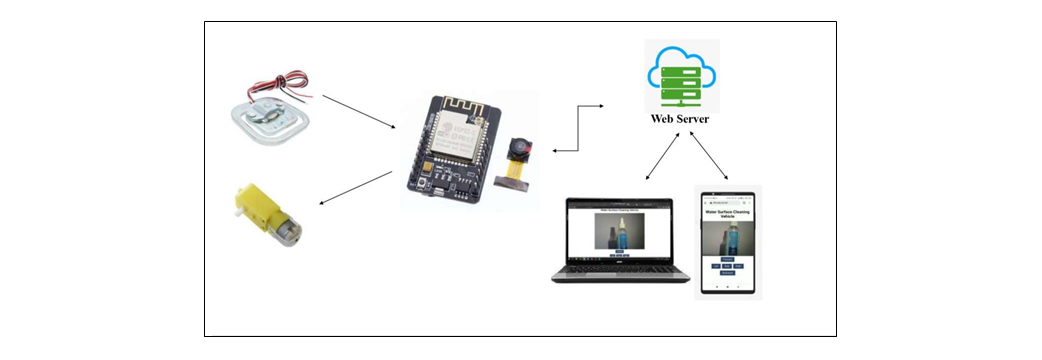
- The ESP32 cam microcontroller module is utilized as an interface unit between the vehicle and the user.
- To control the vehicle, a web-based interface is established that can be viewed from any device on the local network.
- The website also includes a video feed of what the receiver "sees" The pickup mechanism's principle is that it will capture and trap trash on the surface, particularly waste in front of the boat.
- The boat has a control system that requires the user to direct the boat towards the waste in order for it to be cleaned.
- A load cell is used to determine the weight of total garbage gathered in the bin so that the vehicle stops accumulating waste after a set limit and does not sink into the water.
For the boat's maneuverability, two thrusters were used in this project.